HPIM0784
3. Budowa robotów przemysłowych

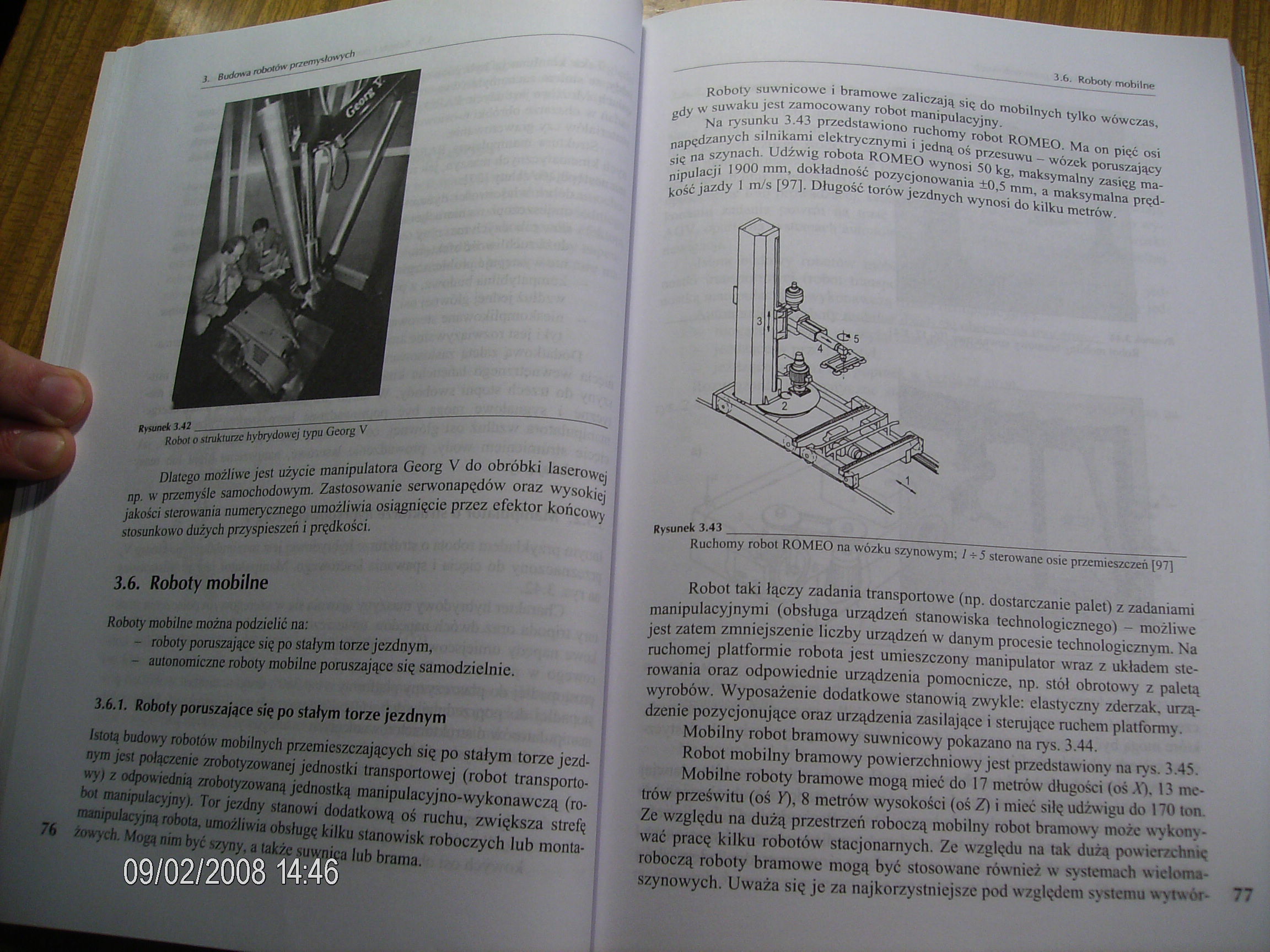
Rysunek 3.42_____________
Robot o stroktuize hybrydowej typu Georg V
Dlatego możliwe jest użycie manipulatora Georg V do obróbki laserowej np. w przemyśle samochodowym. Zastosowanie serwonapędów oraz wysokiej jakości sterowania numerycznego umożliwia osiągnięcie przez efektor końcowy stosunkowo dużych przyspieszeń i prędkości.
3.6. Roboty mobilne
Roboty mobilne można podzielić na:
- roboty poruszające się po stałym torze jezdnym,
I autonomiczne roboty mobilne poruszające się samodzielnie.
3.6.1. Roboty poruszające się po stałym torze jezdnym
Istotą budowy robotów mobilnych przemieszczających się po stałym torze jezdnym jest połączenie zrobotyzowanej jednostki transportowej (robot transportowy) z odpowiednią zrobotyzowaną jednostką manipulacyjno-wykonawczą (robot manipulacyjny). Tor jezdny stanowi dodatkową oś ruchu, zwiększa strefę I manipulacyjną robota, umożliwia obsługę kilku stanowisk roboczych lub monta- I 76 żowYch. Mona nim bvć szyny, a także suwnica lub brama.
Roboty suwnicowe i bramowe zaliczają się do mobilnych tylko wówczas, gdy w suwaku jest zamocowany robot manipulacyjny.
Na rysunku 3.43 przedstawiono ruchomy robot ROMEO. Ma on pięć osi napędzanych silnikami elektrycznymi i jedną oś przesuwu — wózek poruszający się na szynach. Udźwig robota ROMEO wynosi 50 kg, maksymalny zasięg manipulacji 1900 mm, dokładność pozycjonowania ±0,5 mm, a maksymalna prędkość jazdy 1 m/s [97]. Długość torów jezdnych wynosi do kilku metrów.
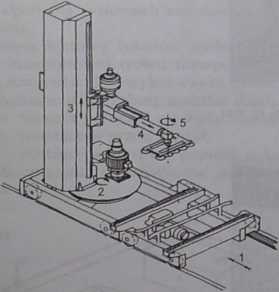
Rysunek 3.43 _ ____
Ruchomy robot ROMEO na wózku szynowym; / -s-5 sterowane osie przemieszczeń [97]
Robot taki łączy zadania transportowe (np. dostarczanie palet) z zadaniami manipulacyjnymi (obsługa urządzeń stanowiska technologicznego) - możliwe jest zatem zmniejszenie liczby urządzeń w danym procesie technologicznym. Na ruchomej platformie robota jest umieszczony manipulator wraz z układem sterowania oraz odpowiednie urządzenia pomocnicze, np. stół obrotowy z paletą wyrobów. Wyposażenie dodatkowe stanowią zwykle: elastyczny zderzak, urządzenie pozycjonujące oraz urządzenia zasilające i sterujące ruchem platformy.
Mobilny robot bramowy suwnicowy pokazano na rys. 3.44.
Robot mobilny bramowy powierzchniowy jest przedstawiony na rys. 3.45.
Mobilne roboty bramowe mogą mieć do 17 metrów długości (oś A3. 13 metrów prześwitu (oś Y), 8 metrów wysokości (oś Z) i mieć siłę udźwigu do 170 ton.
Ze względu na dużą przestrzeń roboczą mobilny robot bramowy może wykony-wać pracę kilku robotów stacjonarnych. Ze względu na tak dużą powierzchnię roboczą roboty bramowe mogą być stosowane również w systemach wieloma-szynowych. Uważa się je za najkorzystniejsze pod względem systemu wytwór- 77
Wyszukiwarka
Podobne podstrony:
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
87439 P1080216 3. Budowa robotów przemysłowych Rysunek3.42 -
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
więcej podobnych podstron