47937 P1080215
3. Budowa robotów przemysłowych

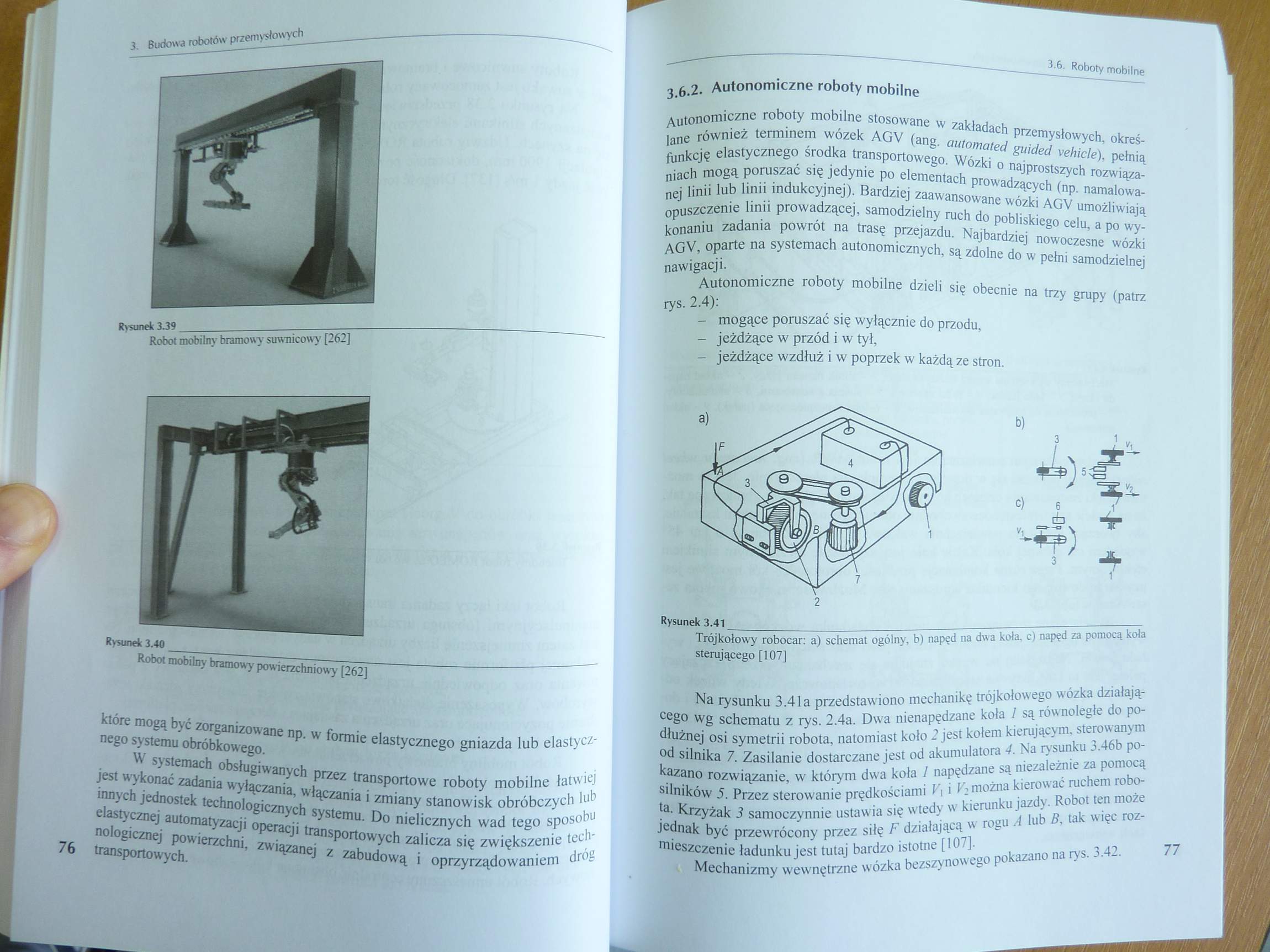
Rysunek 3.40 __
Robot mobilny bramowy powierzchniowy [262]
które mogą być zorganizowane np. w formie elastycznego gniazda lub elastycz- I nego systemu obróbkowego.
W systemach obsługiwanych przez transportowe roboty mobilne łatwiej I jest wykonać zadania wyłączania, włączania i zmiany stanowisk obróbczych lub I innych jednostek technologicznych systemu. Do nielicznych wad tego sposobu I elastycznej automatyzacji operacji transportowych zalicza się zwiększenie tech- I nologicznej powierzchni, związanej z zabudową i oprzyrządowaniem dróg I 76 transportowych.
3.6.2. Autonomiczne roboty mobilne
Autonomiczne roboty mobilne stosowane w zakładach przemysłowych, określane również terminem wózek AGV (ang. automated guided vehłcle), pełnią funkcję elastycznego środka transportowego. Wózki o najprostszych rozwiązaniach mogą poruszać się jedynie po elementach prowadzących (np. namalowanej linii lub linii indukcyjnej). Bardziej zaawansowane wózki AGV umożliwiają opuszczenie linii prowadzącej, samodzielny ruch do pobliskiego celu, a po wykonaniu zadania powrót na trasę przejazdu. Najbardziej nowoczesne wózki AGV, oparte na systemach autonomicznych, są zdolne do w pełni samodzielnej nawigacji.
Autonomiczne roboty mobilne dzieli się obecnie na trzy grupy (patrz rys. 2.4):
- mogące poruszać się wyłącznie do przodu,
— jeżdżące w przód i w tył,
• —- jeżdżące wzdłuż i w poprzek w każdą ze stron.
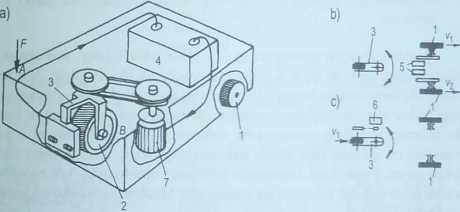
Rysunek 3^_
. Trójkołowy róbocar: a) schemat ogólny, b) napęd na dwa koła, c) napęd za pomocą koła sterującego [107]
Na rysunku 3.41 a przedstawiono mechanikę trójkołowego wózka działającego wg schematu z rys. 2.4a. Dwa nienapędzane koła 1 są równoległe do podłużnej osi symetrii robota, natomiast koło 2 jest kołem kierującym, sterowanym od silnika 7. Zasilanie dostarczane jest od akumulatora 4. Na rysunku 3.46b pokazano rozwiązanie, w którym dwa koła 1 napędzane są niezależnie za pomocą silników 5. Przez sterowanie prędkościami Vx i V2 można kierować mchem robota. Krzyżak 3 samoczynnie ustawia się wtedy w kierunku jazdy. Robot ten może jednak być przewrócony przez siłę F działającą w rogu A lub B, tak więc rozmieszczenie ładunku jest tutaj bardzo istotne [107].
Mechanizmy wewnętrzne wózka bezszynowego pokazano na rys. 3.42.
Wyszukiwarka
Podobne podstrony:
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
87439 P1080216 3. Budowa robotów przemysłowych Rysunek3.42 -
P1080212 3. Budowa robotów przemysłowych Platforma Rysunek 3.34_ Platforma Stewarta [ 107] Platforma
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
więcej podobnych podstron