HPIM0787

3. Budowa robotów przemysłowych
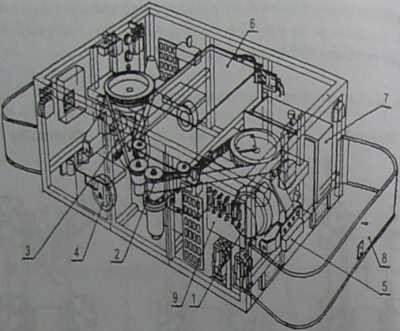
Rysunek 148___
Mechanizmy wewnętrzne wózka bezszynowego: / - silnik napędu jazdy, 2 - układ du skrętu, 3 - kolo jezdne. 4 - rolka oporowa, 5 - antena z sensorami, 6 —akumulatory 7 - prostownik do ładowania akumulatorów. 8 - osłona zabezpieczająca (paląk), 9- uklJ sterowania

Rysunek aat ; -_;______
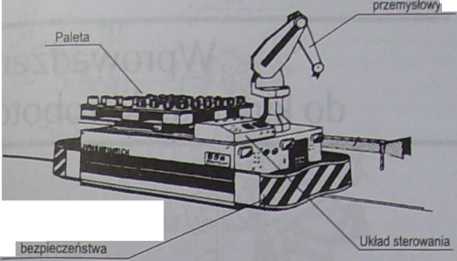
Mechanizm przemieszczający paletę - aktywna stacja załadówczp/rozladowcza na autonomicznym robocie mobilnym
Innym rozwiązaniem jest przedstawiony na rys. 3.50 indukcyjny automatycznie kierowany robot mobilny z zamocowanym manipulatorem przegubowym. Wtedy pojazdy takie mogą być używane do przewożenia oraz do załadunku i wyładunku pojedynczych części. Rozwiązanie to umożliwia również zmniejszenie zapasów części przy stacjach obróbkowych w zautomatyzowanych 82 procesach wytwarzania.
Przegubowy robot
Rysunek 350__~ 1 ' i_
Robot mobilny z zamocowanym manipulatorem przegubowym [54]

3.6. Roboty mobilne
Dotykowy wyłącznik
Ze względu na wymagania bezpieczeństwa ludzi, mogących dostać się w strefę działania robota mobilnego, są wprowadzane zwykle ograniczenia konstrukcyjne [71]:
- maksymalna prędkość przemieszczania do 0,5 m/s,
- prześwit nad podłogą; powinien on być tak mały, aby niemożliwe było przejechanie przeszkody,
- wózki powinny być wyposażone w bufory z czujnikami wyłączającymi zasilanie w przypadku zetknięcia się z przeszkodą.
Roboty mobilne są stosowane zwykle w przypadkach, gdy:
- brak jest miejsca na kilka robotów przemysłowych w określonej przestrzeni linii montażowej,
- brak jest miejsca przy stanowiskach montażowych na magazyny wyrobów (palety),
- czas pracy urządzeń technologicznych jest znacznie dłuższy od czasu pracy obsługujących te urządzenia robotów przemysłowych.
W systemach produkcyjnych obsługiwanych przez autonomiczne roboty mobilne, w porównaniu z tradycyjnymi środkami automatycznego transportu, można łatwiej organizować, rozszerzać i modyfikować trasy przejazdu, wpływając na elastyczność i niezawodność całego systemu. Do nielicznych wad tego sposobu elastycznej automatyzacji operacji transportowych zalicza się zwiększenie technologicznej powierzchni, związanej z zabudową i oprzyrządowaniem dróg transportowych.
Wyszukiwarka
Podobne podstrony:
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
87439 P1080216 3. Budowa robotów przemysłowych Rysunek3.42 -
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
więcej podobnych podstron