HPIM0783

3. Budowa robotów przemysłowych
3.5. Roboty i manipulatory o strukturach hybrydowych

wych. Manipulator ten nic ma żadnych ograniczeń konfiguracji, ale ze wzglę|j I na małą sztywność konstrukcji i skomplikowany układ przenoszenia napę4 zawierający 20 przekładni zębatych stożkowych, nie może być wykorzystywać do realizacji szybkich i dokładnych ruchów.
3.5.1. Manipulator o strukturze hybrydowej PAROS-4
Przykładem robota o strukturze hybrydowej jest manipulator PAROS-4 o cz^ I rcch stopniach swobody, przeznaczony do cięcia szkła do produkcji samocho, i dów osobowych. W tym przypadku problem sprowadza się do odpowiedniego [ orientowania końcowego elektora, którym jest koło tnące. Tak więc, dla efektom I roboczego wymaga się wolnego stopnia swobody wzdłuż osi Z, tak aby żapew. I nić większą swobodę ruchu do orientacji narzędzia wokół tej osi. Strukturę I nipulatora pokazano na rys. 3.41.
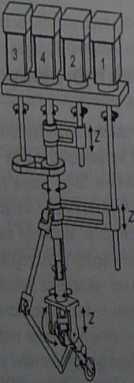
Rysunek wl 11 ■ _
Struktura manipulatora wraz z silnikami i przekładniami [27]
Silnik nr 1 przez zamianę ruchu obrotowego na przesuwny realizuje prze* suw wzdłuż osi Z, silniki nr 2 i 4 powiązane z odpowiednimi przekładniami są1 odpowiedzialne za ruchy obrotowe (rotacja bez ograniczeń), silnik nr 3, powodujący obrót całego ramienia, ma zakres obrotu ograniczony do ok. 60°. Do obrotu wrzeciona może być zastosowany napęd bezpośredni.
Omawiany manipulator jest wykorzystywany w obróbce szkła, gdzie współpracuje ze specjalnie zaprojektowanym ruchomym stołem o dwóch stopniach swobody w kierunkach osi X i Y\ stół ten dodatkowo może być przechyl
mgUBim
Taka kombinacja hybrydowego manipulatora o czterech stopniach swobody ze stołem ruchomym (dwa stopnie swobody) umożliwia cięcie w sześciu osiach. Możliwe jest użycie PAROS-a 4, oprócz ciecia szkła, również do innych zadań w obszarze obróbki 6-osiowcj z małymi siłami, jak np. obróbka miękkich materiałów czy grawerowanie.
Struktura manipulatora PAROS 4, w przeciwieństwie do konwencjonalnych kinematycznych maszyn, jak również do całkowicie równoległych struktur, ma następujące zalety [27]:
- dobre właściwości dynamiczne, dzięki temu, że wszystkie napędy są umieszczone na nieruchomej górnej półce, przez co nie obciążają członów roboczych maszyny (zaleta typowa dla struktur równoległych),
- duża ruchliwość efektora,
- nie występuje problem zginania czy skręcania kabli,
- kompatybilna budowa, z powodu uporządkowania wszystkich napędów wzdłuż jednej głównej osi, .
- nieskomplikowane sterowanie, gdyż zadanie proste i odwrotne kinematyki jest rozwiązywalne analitycznie.
Dodatkową zaletą zastosowania takiego rozwiązania jest możliwość usunięcia wewnętrznego łańcucha kinematycznego i przez to zredukowanie maszyny do trzech stopni swobody. W takim przypadku wszystkie kable energetyczne i sygnałowe mogą być poprowadzone bezpośrednio przez wnętrze manipulatora wzdłuż osi głównej, co jest dużą zaletą w takich zadaniach, jak cięcie strumieniem wody, prowadzenie laserowe, nanoszenie kleju lub masy uszczelniającej.
3.5.2. Manipulator o strukturze hybrydowej Georg V
Innym przykładem robota o strukturze hybrydowej jest manipulator typu Georg V, przeznaczony do cięcia i spawania laserowego. Manipulator jest przedstawiony na rys. 3.42.
Charakter hybrydowy maszyny ujawnia się w szeregowym połączeniu struktury tripoda oraz dwóch napędów umieszczonych na platformie roboczej. Dodatkowe napędy umiejscowione na platformie umożliwiają orientację efektora końcowego w przestrzeni. Pierwszy napęd umożliwia obracanie efektora wokół osi prostopadłej do płaszczyzny platformy o kąt 360°, drugi natomiast wokół osi prostopadłej do poprzedniej o kąt ±60°. Zastosowanie takiej struktury łączy zalety manipulatorów o strukturach równoległych i szeregowych, takich jak:
- duża sztywność konstrukcji oraz
- dobre właściwości dynamiczne zapewnione dzięki zastosowaniu struktury tripoda,
- możliwość orientacji efektora w przestrzeni dzięki zastosowaniu dodai-kowych osi obrotu.
Wyszukiwarka
Podobne podstrony:
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0773 i. Budowa robotów priemyslowyth ■ 3.3. Roboty o budowie modułowej i szereguwej strukturze
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
Budowa robotów przemysłowych 1. Podstawowe zespoły i układy robotów przemysłowych Obecnie produkowan
więcej podobnych podstron