52629 P1080213
1. Budowa robotów przemysłowych
3.5. Roboty i manipulatory o strukturach hybrydowych
W robolach o strukturach hybrydowych występują zamknięte i otwarte łańcuchy kinematyczne, co oznacza połączenie kinematyki równoległej i szeregowej. Hybrydowe rozwiązania kinematyczne oferują znacznie większe możliwości. Uzyski wa- I ny kąt odchylenia platformy roboczej wynosi wr tym przypadku nawet ±95° i jest I wyraźnie większy niż dla kinematyk w pełni równoległych, w których sięga naj- I wyżej ±60° (patrz rys. 335). Ruchome masy w przypadku kinematyk hybrydo- I wych są oceniane jako większe, jednakże dzięki odpowiedniemu zaprojektowaniu I można osiągnąć dynamikę w części przestrzeni roboczej praktycznie porównyw ał- I ną z kinematykami równoległymi. Można także uzyskać znaczne rozszerzenie przestrzeni roboczej, ograniczonej w kinematykach w pełni równoległych [90].
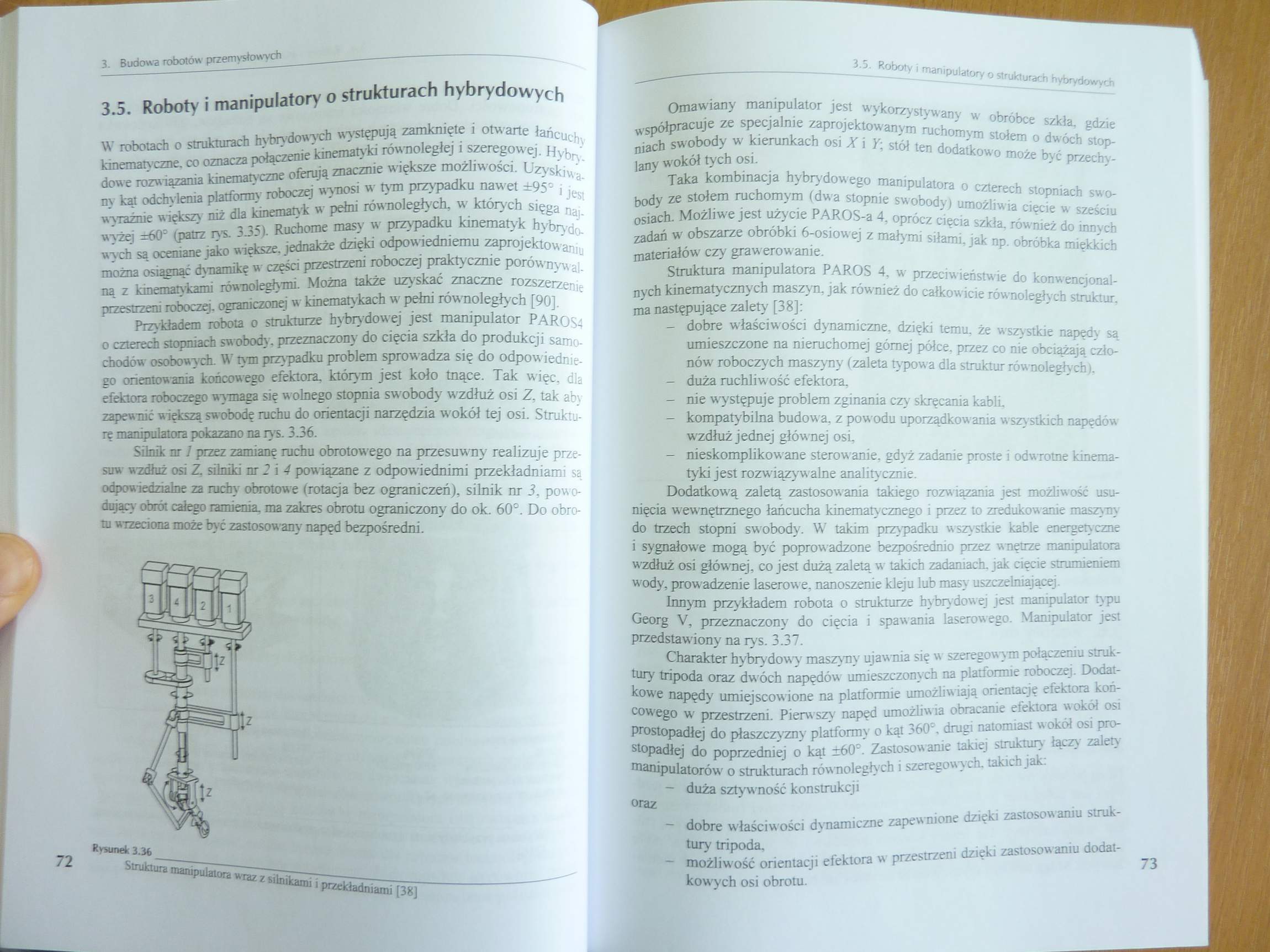
Przykładem robota o strukturze hybrydowej jest manipulator PAROS4 I o czterech stopniach swobody, przeznaczony do cięcia szkła do produkcji samo- I chodów osobowych. W tym przypadku problem sprowadza się do odpowiednie- I go orientowania końcowego efektora, którym jest koło tnące. Tak więc, dla I efektara roboczego wymaga się wolnego stopnia swobody wzdłuż osi Z, tak aby I zapewnić większą swobodę rudni do orientacji narzędzia wokół tej osi. Struktu- I rę manipulatora pokazano na rys. 336.
Silnik nr 1 przez zamianę ruchu obrotowego na przesuwny realizuje prze- I suw wzdłuż osi Z silniki nr 2 i 4 powiązane z odpowiednimi przekładniami są I odpowiedzialne za mchy obrotowe (rotacja bez ograniczeń), silnik nr 3, pow o- I dujący obrót całego ramienia, ma zakres obrotu ograniczony do ok. 60°. Do obro- i tu wTzeciona może być zastosowany napęd bezpośredni.

Rysunek 3.36

"raz z silnikami j przekładniami [38]
Omawiany manipulator jest wykorzystywany w obróbce szkła, gdzie współpracuje ze specjalnie zaprojektowanym ruchomym stołem o dwóch stopniach swobody w kierunkach osi X i Y\ stół ten dodatkowo może być przechylany wokół tych osi .
Taka kombinacja hybrydowego manipulatora o czterech stopniach swobody ze stołem ruchomym (dwa stopnie swobody) umożliwia cięcie w sześciu osiach. Możliwe jest użycie PAROS-a 4, oprócz cięcia szkła, również do innych zadań w obszarze obróbki 6-osiowej z małymi siłami, jak np. obróbka miękkich materiałów czy grawerowanie.
Struktura manipulatora PAROS 4, w przeciwieństwie do konwencjonalnych kinematycznych maszyn, jak również do całkowicie równoległych struktur, ma następujące zalety [38]:
— dobre właściwości dynamiczne, dzięki temu, że wszystkie napędy są umieszczone na nieruchomej górnej półce, przez co nie obciążają członów roboczych maszyny (zaleta typowa dla struktur równoległych).
— duża ruchliwość efektora,
— nie występuje problem zginania czy skręcania kabli,
— kompatybilna budowa, z powodu uporządkowania wszystkich napędów wzdłuż jednej głównej osi,
— nieskomplikowane sterowanie, gdyż zadanie proste i odwrotne kinematyki jest rozwiązywalne analitycznie.
Dodatkową zaletą zastosowania takiego rozwiązania jest możliwość usunięcia wewnętrznego łańcucha kinematycznego i przez to zredukowanie maszyny do trzech stopni swobody. W takim przypadku wszystkie kable energetyczne i sygnałowe mogą być poprowadzone bezpośrednio przez wnętrze manipulatora wzdłuż osi głównej, co jest dużą zaletą w takich zadaniach, jak cięcie strumieniem wody, prowadzenie laserow e, nanoszenie kleju lub masy uszczelniającej.
Innym przykładem robota o strukturze hybrydowej jest manipulator typu Georg V, przeznaczony do cięcia i spawania laserowego. Manipulator jest przedstawiony na rys. 3.37.
Charakter hybrydowy maszyny ujawnia się w szeregowym połączeniu struktury tripoda oraz dwóch napędów umieszczonych na platformie roboczej. Dodatkowe napędy umiejscowione na platformie umożliwiają orientację efektora końcowego w przestrzeni. Pierwszy napęd umożliwia obracanie efektora wokół osi prostopadłej do płaszczyzny platformy o kąt 360°, drugi natomiast wokół osi prostopadłej do poprzedniej o kąt ±60°. Zastosowanie takiej struktury łączy zalety manipulatorów o strukturach równoległych i szeregowych, takich jak:
— duża sztywność konstrukcji
oraz
— dobre właściwości dynamiczne zapewnione dzięki zastosowaniu struktury tripoda,
— możliwość orientacji efektora w przestrzeni dzięki zastosowaniu dodatkowych osi obrotu.
73
Wyszukiwarka
Podobne podstrony:
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
P1080203 3. Budowa robotów przemysłowych siywane do napędu następnych stopni swobody. W obudowie zna
P1080206 3. Budowa robotów przemysłowych Tablica 3.2. Specyfikacja techniczna wybranych profili firm
więcej podobnych podstron