P1080203
3. Budowa robotów przemysłowych
siywane do napędu następnych stopni swobody. W obudowie znajdura gniazda łożysk ta^żxiwo-roIkowych. które umożliwiają jednocześnie wvehy\e nie TÓ\śT3ol£^cm-odów i obrót korby. Istniejąca wewnątrz obudowy przestrze. może być ^torzysiaoa do prowadzenia elastycznych przewodów.
Ronsirokcię manipulatora wielokorbowego pokazano na rys. 3.16.
t>)
251460
KHondiK
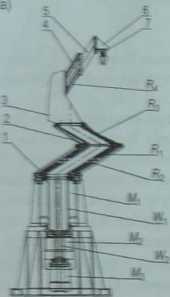
Mampuiaor wreink-irbrmy a) «rfiamgi konstrukcyjny. b) przestrzeń robocza [82.83j
Trzy pierwsze stopnie swobody o osiach pionowych są napędzane przez sibriki bezpośredniego napęds które są zamontowane współosiowo w nieruchomej podstawie. Z silnikiem M\ jest bezpośrednio związany ukośny człon i. drugi silnik W; za pośrednictwem wała W% i równoległowodu R \ napędza człon _ Silnik M-. przez wal W& i dwa równolegiowody Rz i Rs napędza człon 3. Charakterystyczną cechą takiego rozwiązania jest zachowanie orientacji przez człon, którego silnik napędowy jest zatrzymany, niezależnie od ruchów wykonywanych przez pozostałe człony. Człon 3 ma kształt kolumny, w której są umieszczone słoiki z przekładniami napędzającymi czwarty stopień swobody ramienu oraz kiść. Cz»nnv stopień sw obody zrealizowano z użyciem dwóch korb ukoś nyth 4 i 5 o identycznej długości, sprzężonych za pomocą równoległowod zewnętrznego U* i napędzanych przez ten sam silnik z tą samą prędkością a1 w przeciwnych kierunkach. W ten sposób uzyskano niezbyt skomplikowany m cńanizm prosiow odu. zapewniający piaoowe ruchy końcówki ramienia. Sprzę: nie dynamiczne zrealizow anego w len sposób czwartego stopnia swobody z tq ma pierwszymi stopniami swobody jest bardzo małe. Przez odpowiednie r mieszczenie silników napędowych na członie trzecim można również łai zjpeu-mć jego odsprzężenie dynamiczne od dwóch pierwszych stopni swoK 00 ułatwia sterowanie szybkimi mchami. Manipulator jest zakończon\ ki
o dwóch stopniach swobody, składającą się z członów 6 i 7. W celu zapewnienia lekkości i odpowiedniej sztywności konstrukcji kolejne człony manipulatora są połączone ze sobą za pomocą pojedynczych łożysk kizyżowo-rolkowych o wysokiej jakości. Łożyska główne równoległowodów są również tego typa.
Przestrzeń robocza ramienia ma kształt walca (iys.3.16b). W znacznym obszarze, obejmującym ok. 60° przestrzeni roboczej, ramię ma bardzo dobre, zbliżone do izotropowych, własności kinematyczne. Pierwszy i drogi człon ramienia napędzane silnikami umieszczonymi na podstawie mają nieograniczone zakresy ruchów obrotowych. Ruch trzeciego członu jest ogramczonv do kilim obrotów ze względu na skręcanie się kabli silników zamocowanych na tym członie. Końcówka ramienia może wykonywać ruchy pionowe o zakresie równym sumie długości członów 4 i 5. przy nieograniczonym zakresie obrotu silnika napędzającego. Warto zwrócić uwagę na możliw ość wykorzystania trzeciego stopnia swobody ramienia do sterowania orientacją kiści istotne jest również, że przy zatrzymanym silniku mchy ramienia nie wywołują orientacji członów 6 i 7.
Typowe konfiguracje manipulatora przedstawiono na rys. 3.17.
Rysunek HZ. asm _
Typowe konfiguracje manipulatora [82.83]
3.3. Roboty o budowie modułowej i szeregowej strukturze kinematycznej
3.3.1. Wiadomości wstępne
W ostatnich latach producenci zaczęli zwracać znacznie większą uwagę na prostotę budowy i tedmologi czność robotom, mając na względzie zmniejszenie kosztów wytwarzania i ceny tych urządzeń, ale bez ograniczenia ich maż- 53
Wyszukiwarka
Podobne podstrony:
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
P1080206 3. Budowa robotów przemysłowych Tablica 3.2. Specyfikacja techniczna wybranych profili firm
P1080211 3. Budowa robotów przemysłowych wymiarowej przestrzeni, określonej przez trzy osie X, Y, Z,
P1080212 3. Budowa robotów przemysłowych Platforma Rysunek 3.34_ Platforma Stewarta [ 107] Platforma
więcej podobnych podstron