P1080212
3. Budowa robotów przemysłowych
Platforma
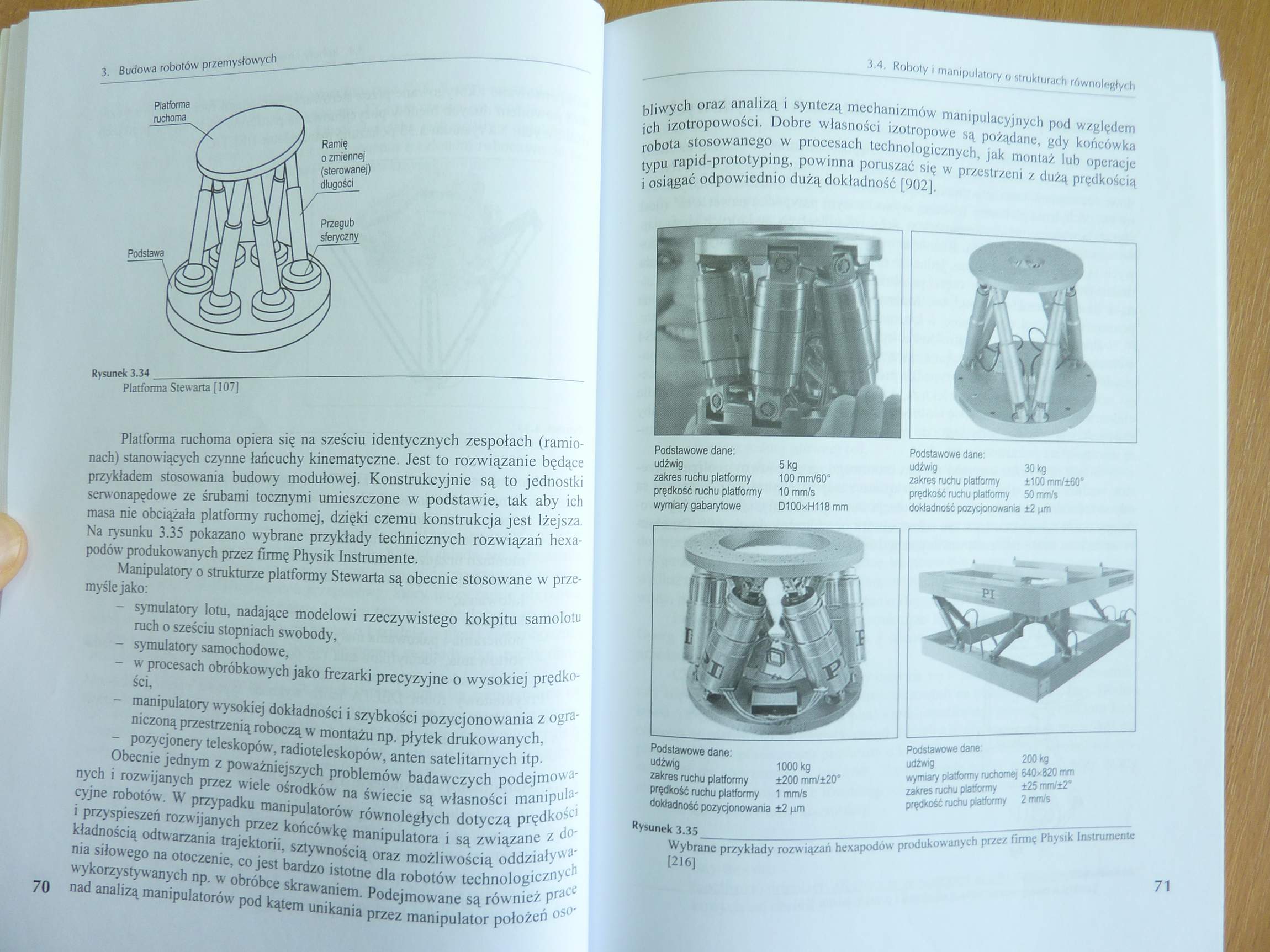
Rysunek 3.34_
Platforma Stewarta [ 107]
Platforma ruchoma opiera się na sześciu identycznych zespołach (ramionach) stanowiących czynne łańcuchy kinematyczne. Jest to rozwiązanie będące przykładem stosowania budowy modułowej. Konstrukcyjnie są to jednostki serwonapędowe ze śrubami tocznymi umieszczone w podstawie, tak aby ich masa nie obciążała platformy ruchomej, dzięki czemu konstrukcja jest lżejsza. Na rysunku 3.35 pokazano wybrane przykłady technicznych rozwiązań hexa-podów produkowanych przez firmę Physik Instrumente.
Manipulatory o strukturze platformy Stewarta są obecnie stosowane w przemyśle jako:
- symulatory lotu, nadające modelowi rzeczywistego kokpitu samolotu ruch o sześciu stopniach swobody,
- symulatory samochodowe,
- w procesach obróbkowych jako frezarki precyzyjne o wysokiej prędkości,
- manipulatory wysokiej dokładności i szybkości pozycjonowania z ograniczoną przestrzenią roboczą w montażu np. płytek drukowanych,
- pozycjonery teleskopów, radioteleskopów, anten satelitarnych itp.
Obecnie jednym z poważniejszych problemów badawczych podejmowanych i rozwijanych przez wiele ośrodków na świecie są własności manipulacyjne robotów. W przypadku manipulatorów równoległych dotyczą prędkości i przyspieszeń rozwijanych przez końcówkę manipulatora i są związane z dokładnością odtwarzania trajektorii, sztywnością oraz możliwością oddziaływania siłowego na otoczenie, co jest bardzo istotne dla robotów technologicznych wykorzystywanych np. w obróbce skrawaniem. Podejmowane są również prace
70 nad analizą manipulatorów pod kątem unikania przez manipulator położeń oso-
bliwych oraz analizą i syntezą mechanizmów manipulacyjnych pod względem ich izotropowości. Dobre własności izotropowe są pożądane, gdy końcówka robota stosowanego w procesach technologicznych, jak montaż lub operacje typu rapid-prototyping, powinna poruszać się w przestrzeni z dużą prędkością i osiągać odpowiednio dużą dokładność [902].

Podstawowe dane: udźwig 5 kg
zakres ruchu platformy 100 mm/60°
prędkość ruchu platformy 10 mm/s
wymiary gabarytowe D100xH118 mm
Podstawowe dane: udźwig 30 kg
zakres ruchu platformy ±100 mm/±60*
prędkość ruchu platformy 50 mm/s dokładność pozycjonowania ±2\an

Podstawowe dane:
udźwig 1000 kg
zakres ruchu platformy ±200 mm/±20°
prędkość ruchu platformy 1 mm/s dokładność pozycjonowania ±2 jam
Podstawowe dane: udźwig 200 kg
wymiary platformy ruchomej 640x820 mm zakres ruchu platformy ±25 mml±2°
prędkość ruchu platformy 2 mm/s
Rysunek 3.35__
Wybrane przykłady rozwiązań hexapodów produkowanych przez firmę Physik Instrumenie
[216]
71
Wyszukiwarka
Podobne podstrony:
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
87439 P1080216 3. Budowa robotów przemysłowych Rysunek3.42 -
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
P1080203 3. Budowa robotów przemysłowych siywane do napędu następnych stopni swobody. W obudowie zna
więcej podobnych podstron