87439 P1080216
3. Budowa robotów przemysłowych
Rysunek3.42 - _ ________
Mechanizmy wewnętrzne wózka bezszynowego; 1 - silnik napędu jazdy, 2 - układ napędu skrętu, 3 - kolo jezdne, 4 - rolka oporowa, 5 - antena z sensorami, 6 - akumulator} , 7 - prostownik do ładowania akumulatorów, 8 - osłona zabezpieczająca (pałąk), 9 — układ sterowania
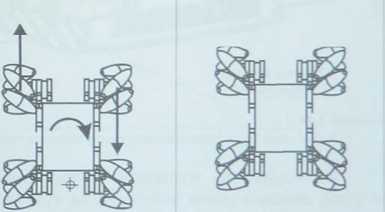
Bardzo ciekawym rozwiązaniem jest robot MWR (ang. mecanum wheel robol) mogący poruszać się w dowolnym kierunku na płaszczyźnie. Jest to możliwe dzięki zastosowaniu czterech kół typu Mecanum. Koła te są zbudowane tak, że na piaście są rozmieszczone swobodnie obracające się rolki o takim kształcie, aby tworzącą koła była powierzchnia walcowa. Rolki obrócone są o kąt 45° względem osi głównej koła. Każde koło jest napędzane niezależnym silnikiem elektrycznym. Przez różne kombinacje prędkości obrotowych kół możliwe jest uzyskanie dowolnego kierunku poruszania się. Możliwości ruchowe robota zestawiono w tabl. 3.3.
Istnieją różne rozwiązania załadunku i wyładunku wózków AGV. Każde wymaga na ogól specjalnej budowy wózka, palet oraz stacji załadunkowej i wyładunkowej. Najczęściej na wózku znajduje się mechanizm przemieszczający paletę, jest to tzw. aktywna stacja zafadowczo-rozładowcza. Wtedy wózek odbiera paletę przedmiotową z magazynu wejściowego (stacji załadunkowej) i dostarcza ją do stanowisk znajdujących się przy maszynach. Na rysunku 3.43 pokazano widok takiego wózka AGV.
Innym rozwiązaniem jest przedstawiony na rys. 3.44 indukcyjny automatycznie kierowany robot mobilny z zamocowanym manipulatorem przegubowym. Wtedy pojazd może być używany do przewożenia oraz do załadunku i wyładunku pojedynczych części. Rozwiązanie to umożliwia również zmniejszenie zapasów części przy stacjach obróbkowych w zautomatyzowanych procesach wytwarzania.
Tablic3 3.3. Możliwości ruchowe robota z kołami typu Mecanum
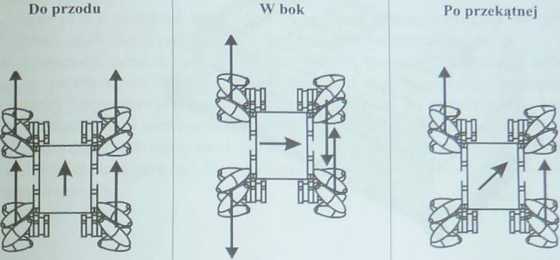
Wszystkie koła są napędzane z taką samą prędkością w tym samym kierunku.
Wszystkie koła są napędzane z taką samą prędkością, lecz w przeciwnych kierunkach (lewe przednie + prawe tylne w jednym kierunku, prawe przednie + lewe tylne w przeciwnym).
Dwa koła są napędzane z tą samą prędkością i w tym samym kierunku, dwa pozostałe są zahamowane.
Obrót wokół geometrycznego środka
Obroty wokół środków osi (przedniej bądź tylnej)
Dowolny ruch
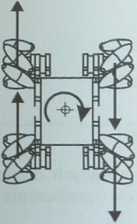
Wszystkie koła są napędzane z taką samą prędkością, lecz w przeciwnych kierunkach (koła lewe w jednym kierunku, koła prawe w przeciwnym).
_
Koła jednej osi są napędzane z taką samą prędkością w przeciwnych kierunkach. Koła drugiej osi są zatrzymane.
Jest to ruch, który wymaga sterowania prędkością j obrotową każdego koła.
W takim przypadku możliwe | jest odtworzenie dowolnego 1 toru.
79
Wyszukiwarka
Podobne podstrony:
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
P1080212 3. Budowa robotów przemysłowych Platforma Rysunek 3.34_ Platforma Stewarta [ 107] Platforma
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
P1080241 5. Sterowanie robotów przemysłowych Rysunek S.4_____ Klasyfikacja układów sterowania robotó
więcej podobnych podstron