83218 P1080279
7. Napędy robotów przemysłowych
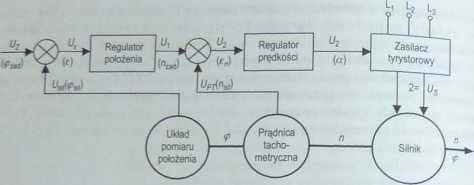
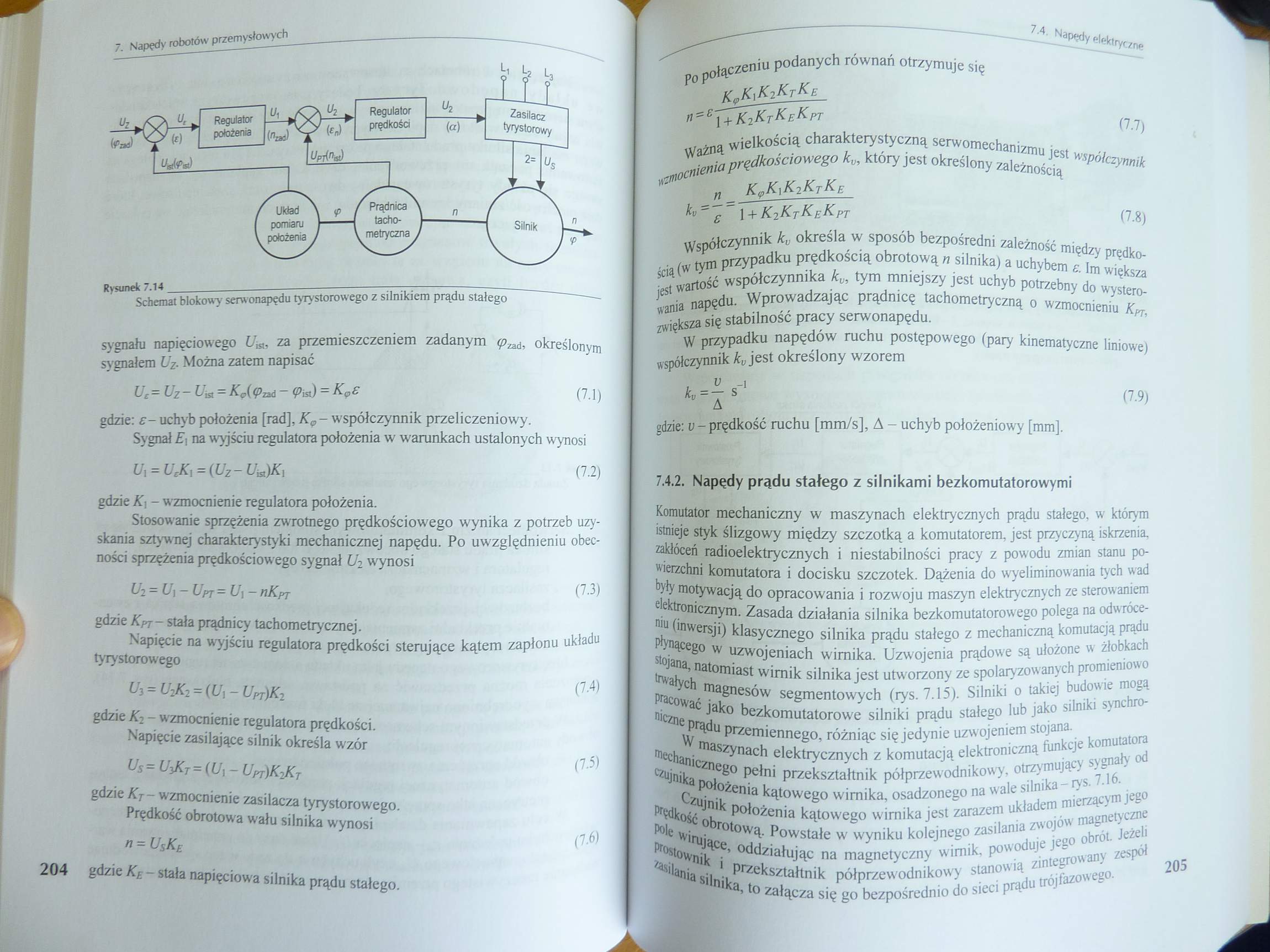
Rysunek 7.14 _
Schemat blokowy serwonapędu tyrystorowego z silnikiem prądu stałego
sygnału napięciowego U&, za przemieszczeniem zadanym (p^, określonym sygnałem U z- Można zatem napisać
Uc= £/z~ Uist= K-ę{.(Pz»ó ^is) = (7.1) |
gdzie: e- uchyb położenia [rad], K9— współczynnik przeliczeniowy.
Sygnał E\ na wyjściu regulatora położenia w warunkach ustalonych wynosi
(7.2)
lĄ = UJC} = {Uz~ZJ^Kl
gdzie K] - wzmocnienie regulatora położenia.
Stosowanie sprzężenia zwrotnego prędkościowego wynika z potrzeb uzyskania sztywnej charakterystyki mechanicznej napędu. Po uwzględnieniu obecności sprzężenia prędkościowego sygnał U2 wynosi
(7.3) |
U2 — U\ — Upj— U\ — nKpi
gdzie Kpt- stała prądnicy tachometrycznej.
Napięcie na wyjściu regulatora prędkości sterujące kątem zapłonu układu tyrystorowego
U3 = U2K2 = (U]-Upt)K2
gdzie JC2 - wzmocnienie regulatora prędkości. Napięcie zasilające silnik określa wzór
Us= U2Kt={Ui - Uft)K2Kt
gdzie Kt- wzmocnienie zasilacza tyrystorowego. Prędkość obrotowa wału silnika wynosi
n=UsKE
gdzie Ke - stała napięciowa silnika prądu stałego.
(7.4)
(7.5)
(7.6)
Po połączeniu podanych równań otrzymuje się _ K pK] KjK-r K i:
a.T>
1 + ^2 KtKeK pr
Ważną wielkością charakterystyczną serwomechanizmu jest współczynnik wzmocnienia prędkościowego k„, który jest określony zależnością
(7-8)
k n KpK,K2KtKe e 1 + KzKtKeKpt
Współczynnik k„ określa w sposób bezpośredni zależność między prędkością (w tym przypadku prędkością obrotową n silnika) a uchybem e. Im większa jest wartość współczynnika kv, tym mniejszy jest uchyb potrzebny do wysterowania napędu. Wprowadzając prądnicę tachometryczną o wzmocnieniu Kn, zwiększa się stabilność pracy serwonapędu.
W przypadku napędów ruchu postępowego (pary kinematyczne liniowe) współczynnik k„ jest określony wzorem
*„ =- s-' (7.9)
A
gdzie: u-prędkość ruchu [mm/s], A - uchyb położeniowy [mm].
7.4.2. Napędy prądu stałego z silnikami bezkomutatorowymi
Komutator mechaniczny w maszynach elektrycznych prądu stałego, w którym istnieje styk ślizgowy między szczotką a komutatorem, jest przyczyną iskrzenia, zakłóceń radioelektrycznych i niestabilności pracy z powodu zmian stanu powierzchni komutatora i docisku szczotek. Dążenia do wyeliminowania tych wad były motywacją do opracowania i rozwoju maszyn elektrycznych ze sterowaniem elektronicznym. Zasada działania silnika bezkomutatorowego polega na odwróceniu (inwersji) klasycznego silnika prądu stałego z mechaniczną komutacją prądu płynącego w uzwojeniach wirnika. Uzwojenia prądowe są ułożone w żłobkach stojana, natomiast wirnik silnika jest utworzony ze spolaryzowanych promieniowo trwałych magnesów segmentowych (rys. 7.15). Silniki o takiej budowie mogą pracować jako bezkomutatorowe silniki prądu stałego lub jako silniki synchroniczne prądu przemiennego, różniąc się jedynie uzwojeniem stojana.
W maszynach elektrycznych z komutacją elektroniczną funkcje komutatora mechanicznego pełni przekształtnik półprzewodnikowy, otrzymujący sygnały od czujnika położenia kątowego wirnika, osadzonego na wale silnika — rys. 7.16.
Czujnik położenia kątowego wirnika jest zarazem układem mierzącym jego prędkość obrotową. Powstałe w wyniku kolejnego zasilania zwojów magnetyczne pole wirujące, oddziałując na magnetyczny wirnik, powoduje jego obrót Jeżeli prostownik i Przekształtnik półprzewodnikowy stanowią zintegrowany zespół zasilania silnika, to załącza się go bezpośrednio do sieci prądu trójfazowego.
Wyszukiwarka
Podobne podstrony:
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
78152 P1080274 7, Napędy robotów przemysłowych Rysunek 7;7 , ^ - . •- - • &nb
P1080280 7. Napędy robotów przemysłowych Rysunek"/ ______ Bezkomulatorowy s
IMGD75 ~ Schemat blokowy serwonapędu tyrystorowego z silnikiem prądu stałego; Ę - sygnał elektryczny
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
więcej podobnych podstron