HPIM0840


6. Napędy robotów przemysłowych a) b) c)

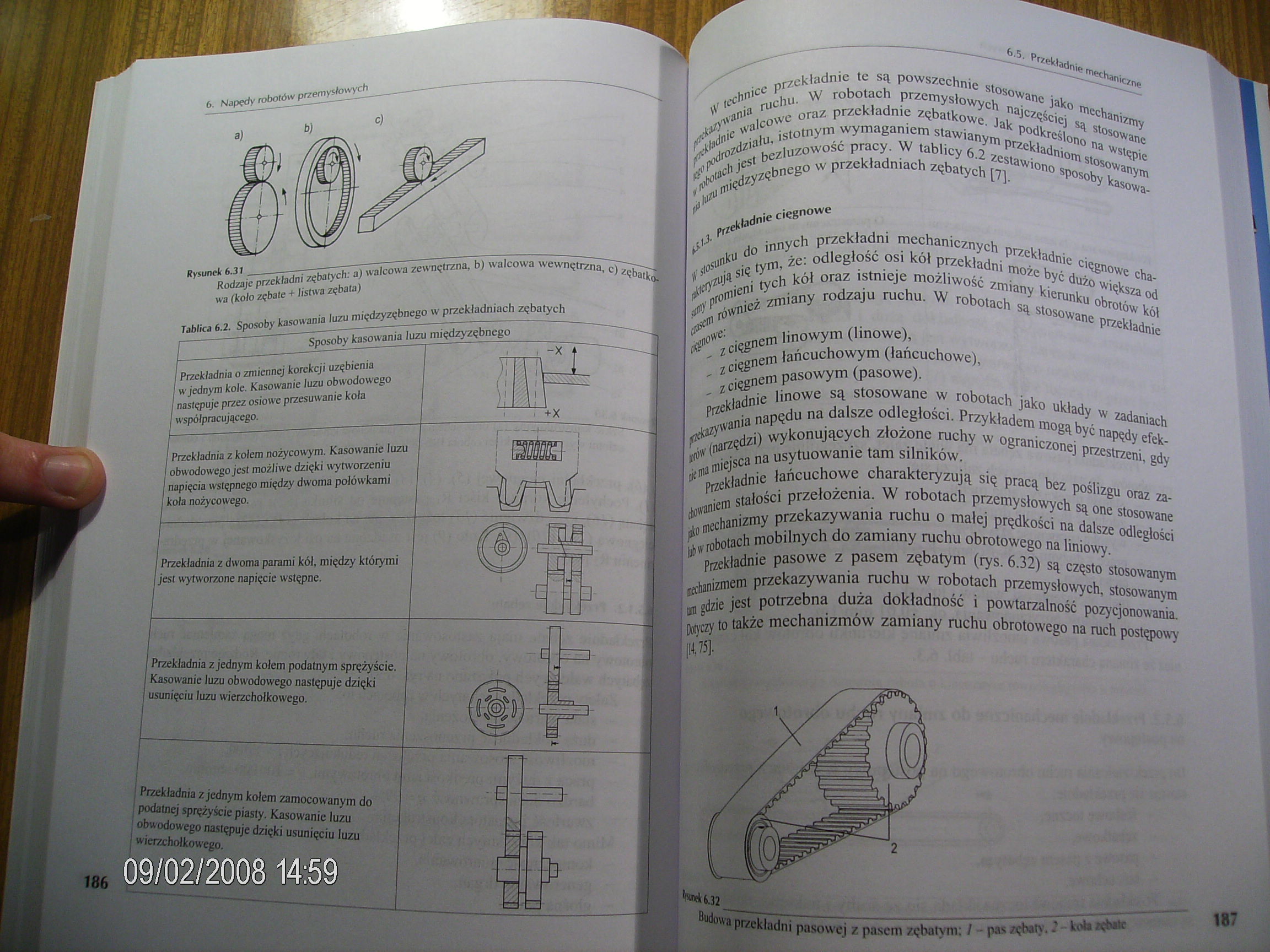
Rysunek 6.31
Rodzaje przekładni zębatych: a) walcowa zewnętrzna, b) walcowa wewnętrzna, wa (kolo zębate + listwa zębata)
Tablica 6.2. Sposoby kasowania luzu międzyzębnego w przekładniach zębatych
Sposoby kasowania luzu międzyzębnego
+X
c^ębat{j
Przekładnia o zmiennej korekcji uzębienia w jednym kole. Kasowanie luzu obwodowego następuje przez osiowe przesuwanie koła współpracującego.

Przekładnia z kołem nożycowym. Kasowanie luzu obwodowego jest możliwe dzięki wytworzeniu napięcia wstępnego między dwoma połówkami koła nożycowego.
Przekładnia z dwoma parami kół, między którymi jest wytworzone napięcie wstępne.
Przekładnia z jednym kołem podatnym sprężyście. Kasowanie luzu obwodowego następuje dzięki usunięciu luzu wierzchołkowego.
Przekładnia z jednym kołem zamocowanym do podatnej sprężyście piasty. Kasowanie luzu obwodowego następuje dzięki usunięciu luzu wierzchołkowego.

i
r
hnice przekładnie te są powszechnie stosowane jako mechanizmy l^ania ruchu. W robotach przemysłowych najczęściej są stosowane walcowe oraz przekładnie zębatkowe. Jak podkreślono na wstępie JJc^^działu, istotnym wymaganiem stawianym przekładniom stosowanym Jgor c|j jest bezluzowość pracy. W tablicy 6.2 zestawiono sposoby kasowa-w Prze^a<^n*ac^ zębatych [7].
fi
przekładnie cięgnowe
stos1
5unku do innych przekładni mechanicznych przekładnie cięgnowe cha-
\
się tym, że: odległość osi kół przekładni może być dużo większa od
promieni tych kół oraz istnieje możliwość zmiany kierunku obrotów kół ^ również zmiany rodzaju ruchu. W robotach są stosowane przekładnie
piłowe* ■,**:■■■ • .
_ z cięgnem linowym (linowe), z cięgnem łańcuchowym (łańcuchowe),
_ z cięgnem pasowym (pasowe).
Przekładnie linowe są stosowane w robotach jako układy w zadaniach okazywania napędu na dalsze odległości. Przykładem mogą być napędy efektów (narzędzi) wykonujących złożone ruchy w ograniczonej przestrzeni, gdy ,j*ina miejsca na usytuowanie tam silników.
Przekładnie łańcuchowe charakteryzują się pracą bez poślizgu oraz zarwaniem stałości przełożenia. W robotach przemysłowych są one stosowane | p mechanizmy przekazywania ruchu o małej prędkości na dalsze odległości lobw robotach mobilnych do zamiany ruchu obrotowego na liniowy.
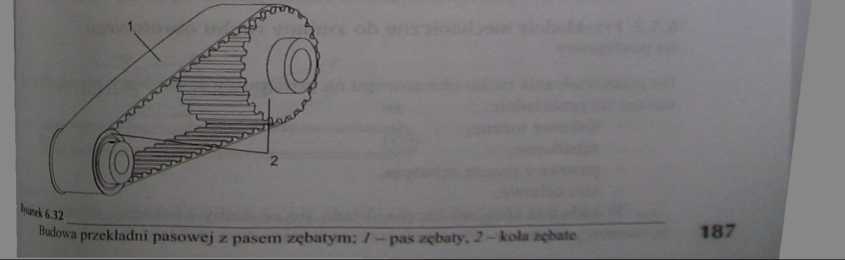
Przekładnie pasowe z pasem zębatym (rys. 6.32) są często stosowanym nechanizmem przekazywania ruchu w robotach przemysłowych, stosowanym om gdzie jest potrzebna duża dokładność i powtarzalność pozycjonowania. Dotyczy to także mechanizmów zamiany ruchu obrotowego na ruch postępowy
m'
Wyszukiwarka
Podobne podstrony:
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
78152 P1080274 7, Napędy robotów przemysłowych Rysunek 7;7 , ^ - . •- - • &nb
P1080292 7. Napędy robotów przemysłowych Wskaźnik materiałochłonności typowej przekładni falowej ogó
P1080280 7. Napędy robotów przemysłowych Rysunek"/ ______ Bezkomulatorowy s
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
więcej podobnych podstron