HPIM0826
Napędy robotów przemysłowych
Pneumatyczne
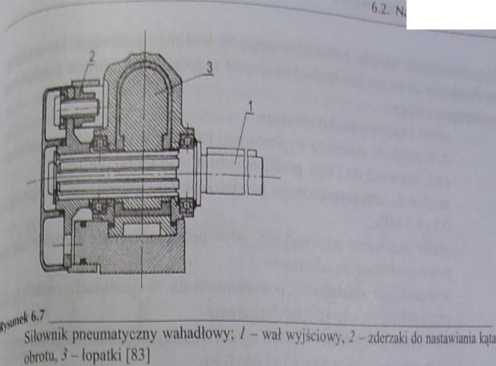
Blok elementów wykonawczych napadu zawiera siłowniki ^ matyczne. Siłowniki stosowane do napędu robotów i mechanizmów pomocnic^ (chwytaków) mogą być zespołami typowymi (produkowanymi przez wyśpij]?1 zowanc firmy) lub specjalnymi. Siłowniki pneumatyczne stosowane najeżyK w robotach, ze względu na ich rozwiązania konstrukcyjne, można podzielić na; 3 cąskowr (z jednostronnym - rys. 6.4 lub dwustronnym tłocznikiem) oraz beztło^ ko\\v - rys, 6.5 i 6.6, membranowe* mieszkowe i wahadłowe - rys. 6.7.
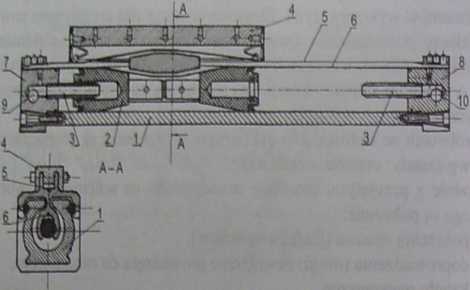
Pneumatyczny siłownik beztłoczyskowy z przeciętą tuleją cylindrową; 1 - tuleja cylindro^J 2 - tłok, 3 - zderzaki, 4 - suwak, 5,6 - uszczelki, 7,8 - pokrywy, 9,10 - otwory dopro^ dzające powietrze [83]
Rysunek 6.5
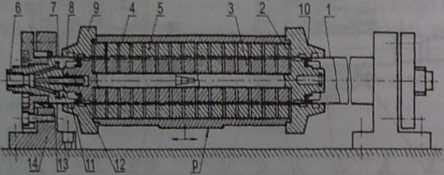
Pneumatyczny siłownik bcztłoczyskowy ze sprzęgiem magnetycznym; / - cienkościenna tuleja o specjalnych własnościach magnetycznych, 2 - tłok, 3 - magnesy trwałe umieszczone w tłoku, 4 - suwak, 5 - magnesy trwałe umieszczone w suwaku, 6 - otwór doprowadzający powietrze, ' - uszczelka, 8 - otwór odpływowy powietrza, 9, 10 - pokrywy, II - uszczelka, 12 - rurka, 13 - otwory odpływowe, 14 - korpus [83]
Rysunek 6.6
W jednostkach kinematycznych współczesnych robotów do realizacji przemieszczeń liniowych stosuje sic siłowniki tłokowe, obecnie coraz częściej beztłoc il/ach konstrukcji, które umożliwiają uzy-
W napędach ruchów lokalnych są stosowane 158 siłowniki membranowe i wahadłowe. _
W rozważanym na rys. 6.3 układzie blok elementów wykonawczych uwiera siłowniki pneumatyczne tłoczyskowc jednostronnego i dwustronnego działania,
Na każdy stopień swobody robota przypada jeden element wykonawczy, upewniający uzyskanie zadanego przemieszczenia liniowego, prędkości i siły. Chwytak robota zawiera element wykonawczy, który zapewnia uchwycenie ptfdniiotu manipulacji, utrzymanie go podczas przemieszczania i oswobodzę* nic po zatrzymaniu w żądanym położeniu.
Położenie ramienia roboczego robota jest określane, jak to już wspomniano, ogranicznikami, które zależnie od programu ustawia się między końcowymi położeniami cylindrów pneumatycznych. Rozwiązanie to jest dogodne tylko w przypadku małej liczby położeń roboczych, ponieważ ograniczniki mają pewną długość i nie mogą być umieszczane dowolnie blisko.
Innym sposobem uzyskania położeń roboczych jest użycie cylindrów wie-lopołożeniowych, czyli połączenie dwóch lub więcej siłowników dwupołoże* niowych. Otrzymana liczba położeń końcowych wynosi 2" z wykładnikiem n. równym liczbie połączonych cylindrów (np. w przypadku trzech cylindrów uzyska się 23 = 8 położeń końcowych). Każdy siłownik wykonuje swój cykl roboczy w kolejności określonej procesem technologicznym. Przełączenie odpowiedniego rozdzielacza następuje wg programu realizowanego przez układ stc* mjący robota.
Nastawianie prędkości elementu wykonawczego uzyskuje się przez dławienie przepływu sprężonego powietrza na wlocie albo wylocie siłowniki Stu* ą do tego zawory dławiące, w których przekroje przepływowe możni nastawiać w zależności od żądanej prędkości.
Przedstawiony na rys. 6.2 układ napędu pneumatycznego jest baidao pro* sty. W zależności od warunków i potrzeb eksploatacji układ może hyc raibuda* wanyo nowe węzłv i fimltri*
■
Wyszukiwarka
Podobne podstrony:
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
HPIM0824 6. Napędy robolów przemytlowych 6.1. Przeznaczenie napędów i zakres ich
HPIM0828 6. Napędy robotów priemyilowyrh 6. Napędy robotów priemyilowyrh jest zbudowany jak chłodnic
więcej podobnych podstron