HPIM0832
6. Napędy robotów przemysłowych
6A. Napędy elektryce
Sygnał E\ na wyjściu regulatora położenia w warunkach ustalonych
CĄ = UgKi = (Uz — UisdKi
gdzie Ki - wzmocnienie regulatora położenia.
Stosowanie sprzężenia zwrotnego prędkośćiowego wynika z potrzeb
Śm
skania sztywnej charakterystyki mechanicznej napędu. Po uwzględnieniu r- r' ‘
noici sprzężenia prędkościowego sygnał U2 wynosi
Ui — Ui — Urr— U\ — nKpr ^ _
gdzie Ker - stała prądnicy tachometrycznej.
Napięcie na wyjściu regulatora prędkości sterujące kątem zapłonu uklaa tyrystorowego u
U, = UjKi = (U, - UnjKi
gdzie Aj - wzmocnienie regulatora prędkości. Napięcie zasilające silnik określa wzór
Us= UjKt={U\ - Urr)K2KT
gdzie Kr-wzmocnienie zasilacza tyrystorowego. Prędkość obrotowa wału silnika wynosi
n=UsKE
gdzie Kr - stała napięciowa silnika prądu stałego.
Po połączeniu podanych równań otrzymuje się
KęK,K2KTKE
(6.4)1
(6.6)1
ł+K2KtKeKpt
Ważną wielkością charakterystyczną serwomechanizmu jest współczynnik wzmocnienia prędkościowego km który jest określony zależnością
K,KtK2KTKE c I + K2KtKeKpt
— —
(6.8)1
Współczynnik k„ określa w sposób bezpośredni zależność między prędko-H ścią (w tym przypadku prędkością obrotową n silnika) a uchybem s. Im większa! jest wartość współczynnika kn tym mniejszy jest uchyb potrzebny do wystero-l wania napędu. Wprowadzając prądnicę tachometryczną o wzmocnieniu KrrU zwiększa się stabilność pracy serwonapędu.
W przypadku napędów ruchu postępowego (pary kinematyczne liniowe)H współczynnik kt jest określony wzorem
- uchyb położeniowy w mm.
S
Napędy prądu stałego z silnikami bezkomutatorowymi
.-uutor mechaniczny w maszynach elektrycznych prądu stałego, w którym Kjejc styk ślizgowy między szczotką a komutatorem, jest przyczyną iskrzenia, jjjceń radioelektrycznych i niestabilności pracy z powodu zmian stanu po-‘Zijctmi komutatora i docisku szczotek. Dążenia do wyeliminowania tych wad u, motywacją do opracowania i rozwoju maszyn elektrycznych ze stero-^„jgn elektronicznym. Zasada działania silnika bezkomulatorowego polega na ^fóceniu (inwersji) klasycznego silnika prądu stałego z mechaniczną komuta-jj prądu płynącego w uzwojeniach wirnika. Uzwojenia prądowe są ułożone .żłobkach stojana, natomiast wirnik silnika jest utworzony ze spolaryzowanych Lnticniowo trwałych magnesów segmentowych (rys. 6.16). Silniki o takiej Gdowie mogą pracować jako bezkomutatorowe silniki prądu stałego lub jako olniki synchroniczne prądu przemiennego.
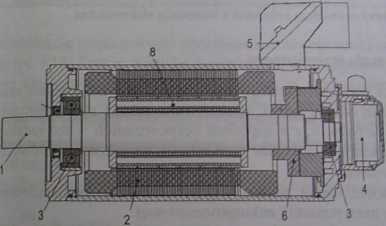
ąsndr6.1^_
Brzkomulalorowy silnik prądu stałego lub silnik synchroniczny grądu przemiennego; / - to! silnika, 2 - uzwojenia w stojanie, 5 - łożyska wirnika, 4 - czujnik położenia kątowego wirnika, 5 - wentylator, 6 - hamulec, 7 - pierścień uszczelniający, 8 - wirnik z segmentami magnetycznymi (magnesy trwale)
W maszynach elektrycznych z komutacją elektroniczną funkcje komuta-tora mechanicznego pełni przekształtnik półprzewodnikowy, otrzymujący sypały od czujnika położenia kątowego wirnika, osadzonego na wale silnika -iys.6.17.
Czujnik położenia kątowego wirnika jest zarazem układem mierzącym jego prędkość obrotową. Powstałe w wyniku kolejnego zasilania zwojów magne-tyczne pole wirujące oddziałując na magnetyczny wirnik, powoduje jego obrót. Jeżeli prostownik i przekształtnik półprzewodnikowy stanowią zintegrowany zespół zasilania silnika, to załącza się go bezpośrednio do sieci prądu (rójfazo-sego.
Wyszukiwarka
Podobne podstrony:
siecia . MAi.NA SZYBKOŚĆ REGUŁACH — Jest to największa zmiana poziomu sygnału na wyjściu regulatora
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
P1080278 7. Napędy robotów przemysłowych tylko z dużymi prędkościami obrotowymi. Na rysunku 7.12 są
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
Tablica 28.2. Wskazówki doboru muf dla kabli elektroenergetycznych I sygnalizacyjnych na napięcie do
więcej podobnych podstron