HPIM0819
5. Sterowanie robotów przemysłowych
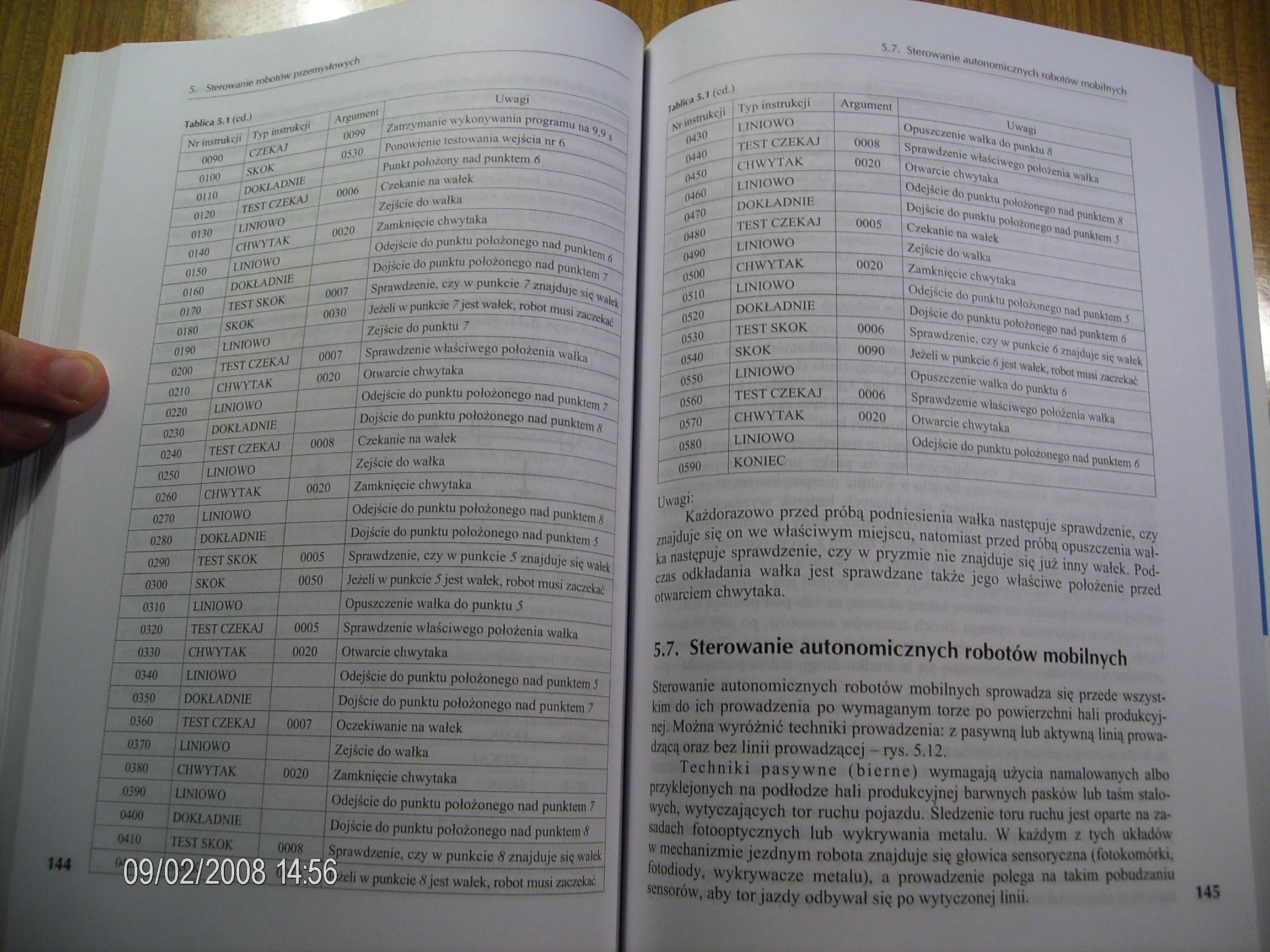
Tablica S.1 icd.)
I Nr instrukcji Typ instrukcji
0090
0100
0110
0120
0130
0140
0150
0160
| CZEKAJ SKOK
DOKŁADNIE
TEST CZEKAJ
LINIOWO
CHWYTAK
LINIOWO
DOKŁADNIE
Argument
0099
0530
0006
Uwagi
Zatrzymanie wykonywania prograntuj^N, Ponowienie testowania wejścia nr 6
0020

Punkt położony nad punktem 6 I Czekanie na wałek I Zejście do walka I Zamknięcie chwytaka
Odejście do punktu położonego nad punĘ^^J

0170
0180
0190
| TEST SKOK SKOK
LINIOWO
0200
0210
0220
0230
0240
0250
0260
0270
0280
0290
0300
0310
0320
0330
0340
0350
0360
0007
0030
Dojście do punktu położonego nad punktcIJp^J Sprawdzenie, czy w punkcie 7znajdujc^jT''''
----W|
Zejście do punktu 7
TEST CZEKAJ
CHWYTAK
LINIOWO
DOKŁADNIE
TEST CZEKAJ
LINIOWO
CHWYTAK
LINIOWO
DOKŁADNIE
TEST SKOK
SKOK
LINIOWO
TEST CZEKAJ
CHWYTAK
LINIOWO
DOKŁADNIE
TEST CZEKAJ
LINIOWO
0007
0020
Otwarcie chwytaka
Odejście do punktu położonego nad punkte
Dojście do punktu położonego nad punktem s
Sprawdzenie właściwrego położenia wałka

0008
Czekanie na wałek
Zejście do wałka
0020
Zamknięcie chwytaka
Odejście do punktu położonego nad punktem 8
Dojście do punktu położonego nad punktem J
0005
Sprawdzenie, czy w punkcie 5 znajduje się wałek I
0050
Jeżeli w punkcie 5 jest wałek, robot musi zaczekać
Opuszczenie wałka do punktu J
0005
Sprawdzenie właściwego położenia wałka
0020
Otwarcie chwytaka
Odejście do punktu położonego nad punktem 5
Dojście do punktu położonego nad punktem 7
0007
Oczekiwanie na wałek
Zejście do wałka
0370

CHWYTAK
LINIOWO
DOKŁADNIE
TEST SKOK
0020
Zamknięcie chwytaka
Odejście do punktu położonego nad punktem 7 Dojście do punktu położonego nad punktem 8 Sprawdzenie, czy w punkcie 8 znajduje się wałek l®jżeii w punkcie 8 jest wałek, robol musi zaczekać
|
0430 _ |
Typjins«}*SŁ--___ |
Argument |
Uwagi |
|
Opuszczenie wałku do punktu »V | |||
|
0008 |
Sprawdzenie właściwego położenia walka | ||
|
0020 |
Otwarcie chwytaka | ||
|
r»iwY i--- |
Odejście do punktu położonego nad punkiem fi | ||
|
i" 0460____ |
Tao k: LA DNIE |
Dojście do punktu położonego nad punktem 5 | |
|
testczekaj__ TTniowo |
0005 |
Czekanie na wałek | |
|
- |
Zejście do walko | ||
|
0490____ |
CHWYTAK |
0020 |
Zamknięcie chwytaka |
|
0500_____ |
i INIOWO |
Odejście do punktu położonego nad punktem 5 | |
|
0510 0520 0530 0540 |
Z ro |
Dojście do punktu położonego nad punktem 6 | |
|
test skok |
0006 |
Sprawdzenie, czy w punkcie 6 znajduje się wałek | |
|
SKOK |
0090 |
Jeżeli w punkcie 6 jest wałek, robot musi zaczekać | |
|
0550 |
liniowo |
Opuszczenie wałka do punktu 6 | |
|
1- -- 0560 |
test czekaj |
0006 |
Sprawdzenie właściwego położenia walka |
|
0570 |
CHWYTAK |
0020 |
Otwarcie chwytaka |
|
0580 |
LINIOWO |
Odejście do punktu położonego nad punktem 6 | |
|
0590 |
KONIEC |
Uwagi:
Każdorazowo przed próbą podniesienia wałka następuje sprawdzenie, czy znajduje się on we właściwym miejscu, natomiast przed próbą opuszczenia wałka następuje sprawdzenie, czy w pryzmie nie znajduje się już inny wałek. Podczas odkładania wałka jest sprawdzane także jego właściwe położenie przed otwarciem chwytaka.
5.7. Sterowanie autonomicznych robotów mobilnych
Sterowanie autonomicznych robotów mobilnych sprowadza się przede wszystkim do ich prowadzenia po wymaganym torze po powierzchni hali produkcyjnej. Można wyróżnić techniki prowadzenia: z pasywną lub aktywną linią prowadzącą oraz bez linii prowadzącej — rys. 5.12.
Techniki pasywne (bierne) wymagają użycia namalowanych albo przyklejonych na podłodze hali produkcyjnej barwnych pasków lub taśm stalowych, wytyczających tor ruchu pojazdu. Siedzenie toru ruchu jest oparte na zasadach fotooptycznych lub wykrywania metalu. W każdym z tych układów w mechanizmie jezdnym robota znajduje się głowica sensoryczna (fotokomórki, fotodiody, wykrywacze metalu), a prowadzenie polega na takim pobudzaniu sensorów, aby tor jazdy odbywał się po wytyczonej linii.
145
Wyszukiwarka
Podobne podstrony:
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
HPIM0812 5. Sterowanie robolów przemysłowych 5. Sterowanie robolów przemysłowych łącznika K3 - linia
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
HPIM0808 5. Sterowanie robotów piwnystowych Roboty z układami o stałym programie (tzw. pick and plac
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
Układy sterowania robotów przemysłowych Układ sterowania robota przemysłowego powinien zapewniać
więcej podobnych podstron