115851
Układy sterowania robotów' przemysłowych
Układ sterowania robota przemysłowego powinien zapewniać współdziałanie wszystkich jego zespołów konstrukcyjnych (układów napędowych, sensorycznych, efektora). programowanie pracy i niezawodne wykonanie zaprogramowanych czynności.
Omawiając układy sterowania robotów, należy pamiętać, że stanowią one tylko jeden z podsystemów zautomatyzowanego stanowiska, gniazda lub systemu produkcyjnego, które mogą zawierać jeden lub więcej robotów, obrabiarki, przenośniki, pojemniki na części, szafy sterownicze itp. Na wyższym poziomie stanowiska czy systemy mogą być połączone w linie i sieci produkcyjne obejmujące całą fabrykę w taki sposób, żeby komputer centralny mógł sterować całym przebiegiem produkcji danego zakładu. Stąd sterowanie robotów przemysłowych jest często związane z szerszym problemem współpracy wielu połączonych ze sobą maszyn i urządzeń w zautomatyzowanym zakładzie produkcyjnym.
1. Robot jako obiekt sterowania
W teorii regulacji przez sterowanie rozumiemy automatyczną realizację ogółu oddziaływali. ukierunkowanych na podtrzymanie lub polepszenie działania sterowanego obiektu w odniesieniu do celu sterowania.
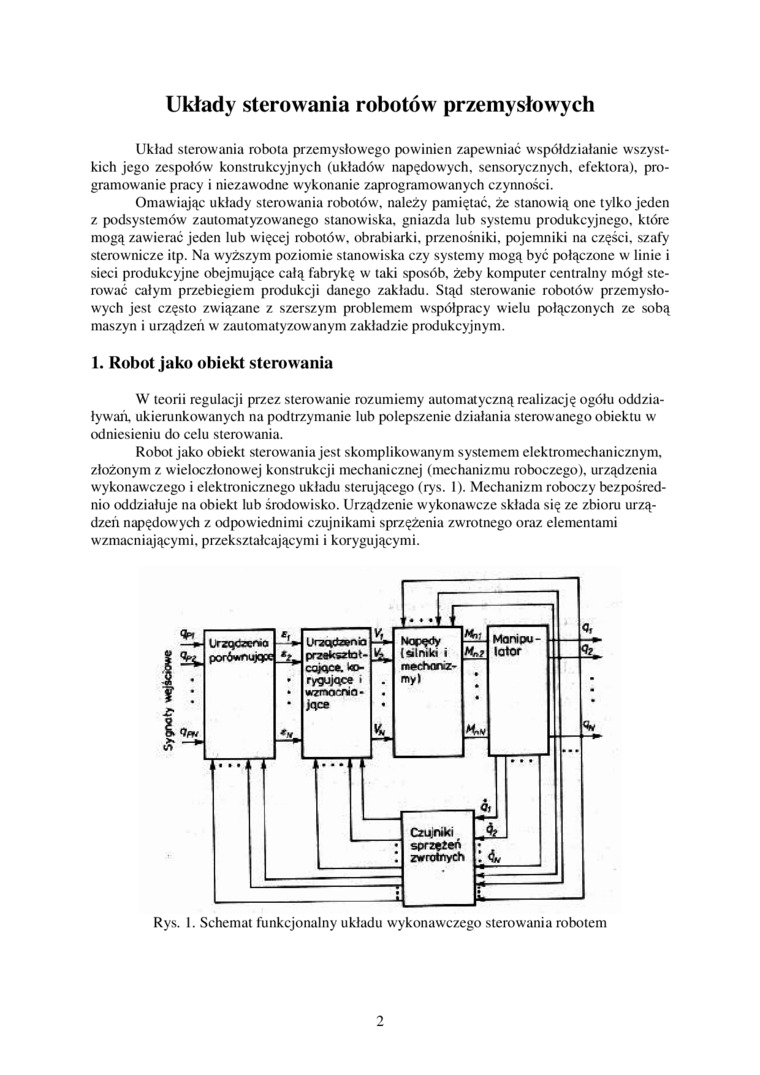
Robot jako obiekt sterowania jest skomplikowanym systemem elektromechanicznym, złożonym z wieloczłonowej konstrukcji mechanicznej (mechanizmu roboczego), urządzenia wykonawczego i elektronicznego układu sterującego (rys. 1). Mechanizm roboczy bezpośrednio oddziałuje na obiekt lub środowisko. Urządzenie wykonawcze składa się ze zbioru urządzeń napędowych z odpowiednimi czujnikami sprzężenia zwrotnego oraz elementami wzmacniającymi, przekształcającymi i korygującymi.
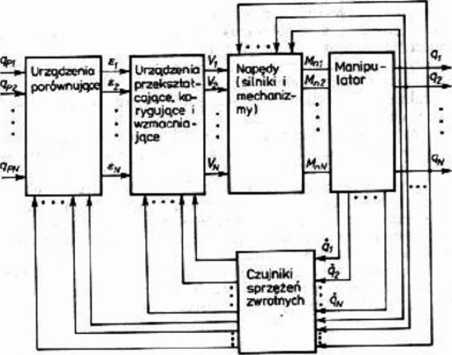
Rys. 1. Schemat funkcjonalny układu wykonawczego sterowania robotem
Wyszukiwarka
Podobne podstrony:
METODY PROGRAMOWANIA ROBOTÓW PRZEMYSŁOWYCH • Układy sterowania programowane przez
P1080250 5. Sterowanie robotów przemysłowych bliżu robota. Przy takim oprogramowaniu operator może o
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
Tadeusz SZKODNYKINEMATYKA ROBOTÓW PRZEMYSŁOWYCH Prędy siłowników wytworzone przez sterownik.
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
Sterowanie robota przemysłowego powinno zapewniać współdziałanie wszystkich jego zespołów
więcej podobnych podstron