9167992551
Tadeusz SZKODNY
KINEMATYKA ROBOTÓW PRZEMYSŁOWYCH
Prędy siłowników wytworzone przez sterownik. powoduje ruch manipulatora do obiektu manipulacji, zauważonego przez kamerę.
Współrzędne obiektu manipulacji pozyskane z kamery.
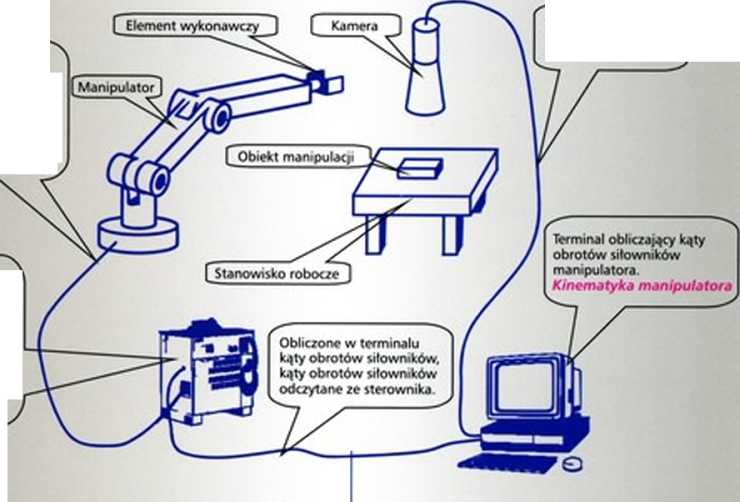
Sterownik Obliczanie k*tów obrotów siłowników przy programowaniu we współrzędnych zewnętrznych manipulatora. Kinematyka manipulatora
GLIWICE 2013
Wyszukiwarka
Podobne podstrony:
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
P1080211 3. Budowa robotów przemysłowych wymiarowej przestrzeni, określonej przez trzy osie X, Y, Z,
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
METODY PROGRAMOWANIA ROBOTÓW PRZEMYSŁOWYCH • Układy sterowania programowane przez
skanuj0049 (24) 57 będzie wytwarzał tylko wówczas, gdy ze sprzedaży wytworzonych przez siebie towaró
SO KRATES Uważał ze tylko ta wiedza ucznia wzbogaci, którą sam sobie wytworzy przez własną
też informacją publiczną będą nie tylko dokumenty zredagowane i wytworzone przez podmiot zobowiązany
Zdjęcie023 Zasada działania metody ultradźwiękowej Wytworzona przez głowicę fala ultradźwiękowa wpro
skanuj0049 (24) 57 będzie wytwarzał tylko wówczas, gdy ze sprzedaży wytworzonych przez siebie towaró
Slajd78 (8) Różne oblicza mobilnych Robotów przemysłowych: Konwencjonalnie: np. wózek AGV firmy
Slajd16 Natężenie pola elektrycznego wytworzonego przez ładunek rozmieszczony wzdłuż linii prostej z
więcej podobnych podstron