HPIM0839
6. Napędy robotów przemysłowych

KpandcfcJ*_
Scbemay współpracy mechanizmu dźwigniowego i przekładni śrubowej

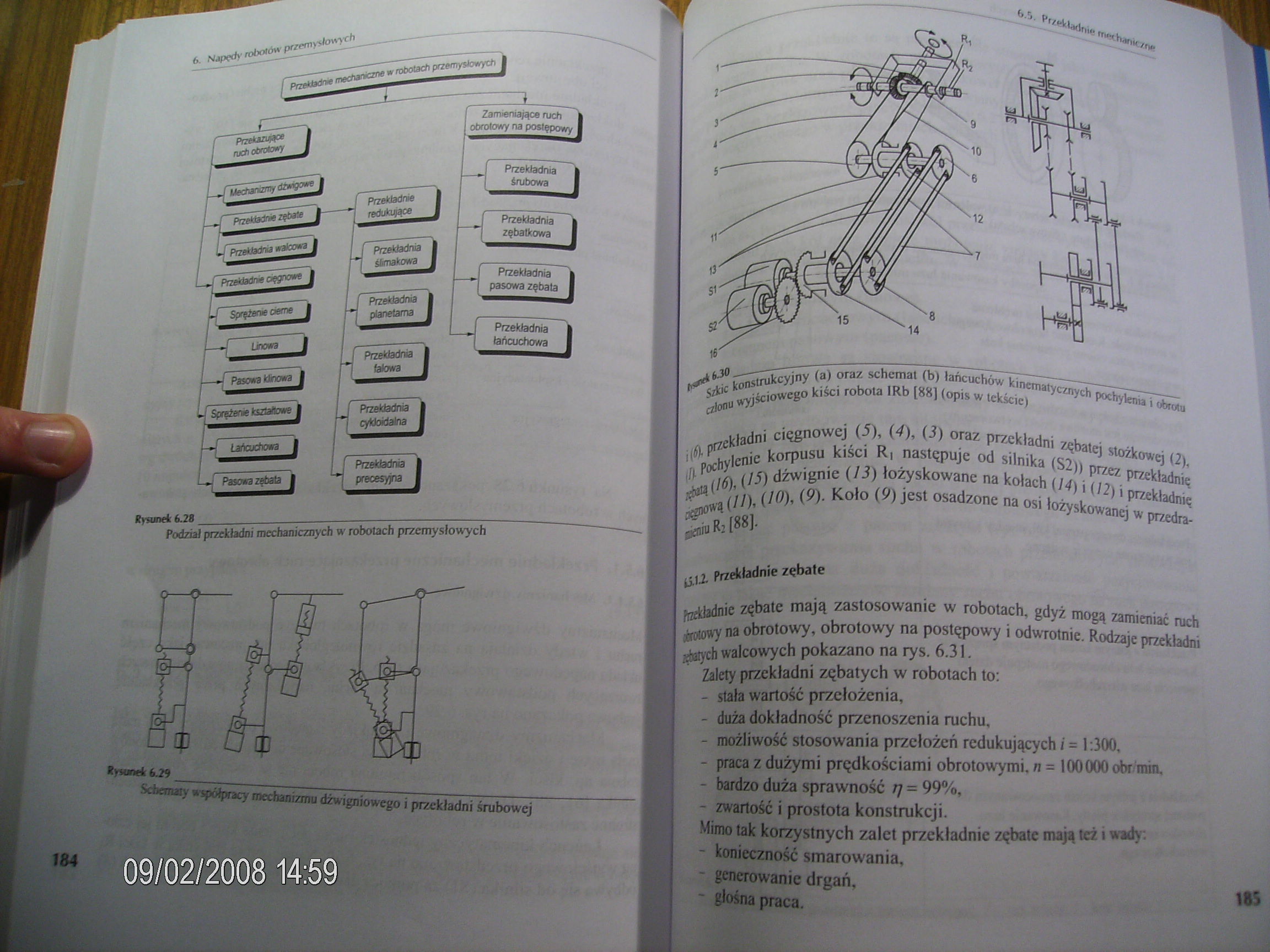
j(ó), przekładni cięgnowej (5), (4), (3) oraz przekładni zębatej stożkowej (2), j/j. pochylenie korpusu kiści Bij następuje od silnika (S2)) przez przekładnię j&ą(I6), (15) dźwignie (13) łożyskowane na kołach (14) i (12) i przekładnię ponową (1 /), (10), (9). Koło (9) jest osadzone na osi łożyskowanej w ptzedra-gjairn R2 ft|)
Przekładnie zębate
przekładnie zębate mają zastosowanie w robotach, gdyż mogą zamieniać ruch I golowy na obrotowy, obrotowy na postępowy i odwrotnie. Rodzaje przekładni I zębatych walcowych pokazano na rys. 6.31.
Zalety przekładni zębatych w robotach to:
- stała wartość przełożenia,
- duża dokładność przenoszenia ruchu,
- możliwość stosowania przełożeń redukujących i = 1:300,
- praca z dużymi prędkościami obrotowymi, n = 100000 obr min,
- bardzo duża sprawność rj = 99%,
- zwartość i prostota konstrukcji.
Mimo tak korzystnych zalet przekładnie zębate mają też i wady:
- konieczność smarowania,
| generowanie drgań,
~ głośna praca.
Wyszukiwarka
Podobne podstrony:
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
HPIM0824 6. Napędy robolów przemytlowych 6.1. Przeznaczenie napędów i zakres ich
HPIM0828 6. Napędy robotów priemyilowyrh 6. Napędy robotów priemyilowyrh jest zbudowany jak chłodnic
więcej podobnych podstron