HPIM0824
6. Napędy robolów przemytlowych
6.1. Przeznaczenie napędów i zakres ich działania
f^^3^l3^iydrauhcznyj

prądu stałego
T**
regulator
stwo pożaru, zanieczyszczenie, temperaturę, oddziaływania mechanicz-ne i inne.
Charakterystyki energetyczne, dok/adnościowe i dynamiczne robotów w znacznym stopniu zależą od rodzaju zastosowanego napędu. Oprócz tego rodzaj napędu określa zarówno możliwości układu sterowania, jak i stopień inteligencji maszynowej robota.
Obecnie większość robotów jest wyposażona w napędy elektryczne i tylko w' nielicznych robotach przemysłowych jest stosowany napęd pneumatyczny lub
napędy elektryczne charakteryzują się sto-przetwarzania energii i dlatego są obecnie
^^chnie stosowane w roBotyce” Jednak napędy płynowe, zarówno siłowej jak i hydrauliczne są w stanie generować większą moc z jednostki masy jak również dużo większe siły z jednostki powierzchni przekroju. Naiy-*2!u 6.2 przedstawiono jak kształtowało się zastosowanie różnych typów na-^ w ostatnich trzydziestu latach XX w.
Rok 1970
Rok 1960

Ipunefc6.2^-—-
Zastosowanie w robotach różnych napędów w ostatnich trzydziestu latach XX wieku
Ł
regulator
~r
zasilacz prądu stałego j jjktedprwtowntay^J
Impulsowy zasilacz elektroniczny
tyrystorowy
tranzystor
|
rowy |
falownik ^ |
[ silnik skokowy | | |
|
F 1 | |||
|
i_ |
1 |
i | |
|
silnik prądu stałego ] |
i 1 silnik asynchroniczny | |
1 silnik synchroniczny | | |
|
komutato rowy |
bezkomuta-l torowy 1 | ||
Rysunek 6.
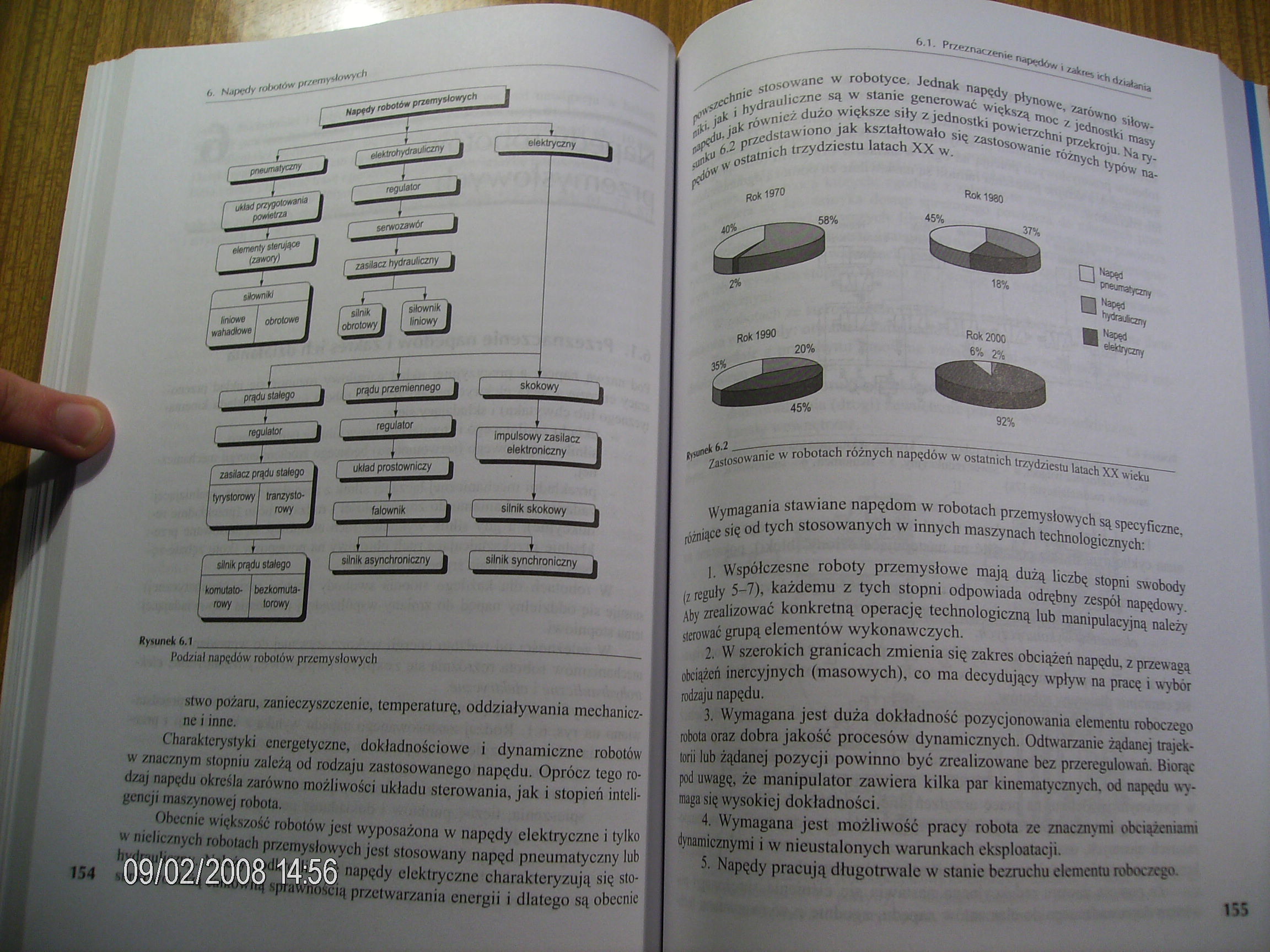
Podział napędów robotów przemysłowych
Wymagania stawiane napędom w robotach przemysłowych są specyficzne, różniące się od tych stosowanych w innych maszynach technologicznych:
i Współczesne roboty przemysłowe mają dużą liczbę stopni swobody (z reguły 5-7), każdemu z tych stopni odpowiada odrębny zespół napędowy. Aby zrealizować konkretną operację technologiczną lub manipulacyjną należy sterować grupą elementów wykonawczych.
2. W szerokich granicach zmienia się zakres obciążeń napędu, z przewagą obciążeń inercyjnych (masowych), co ma decydujący wpływ na pracę i wybór rodzaju napędu.
3. Wymagana jest duża dokładność pozycjonowania elementu roboczego robota oraz dobra jakość procesów dynamicznych. Odtwarzanie żądanej trajektorii lub żądanej pozycji powinno być zrealizowane bez przeregulowań. Biorąc pod uwagę, że manipulator zawiera kilka par kinematycznych, od napędu wymaga się wysokiej dokładności.
4. Wymagana jest możliwość pracy robota ze znacznymi obciążeniami dynamicznymi i w nieustalonych warunkach eksploatacji.
5. Napędy pracują długotrwale w stanie bezruchu elementu roboczego.
Wyszukiwarka
Podobne podstrony:
P1080271 7Napędy robotów przemysłowych 7.1. Przeznaczenie napędów i zakres ich działania Pod nazwą n
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0830 6. Napędy robolów przemysłowych 6.4.1. Napędy prądu stałego z silnikami komutatorowymi Stos
Image 31 3. Napędy robotów przemysłowych 3.1. Klasyfikacja napędów robolów Napęd robotów przemysłowy
HPIM0812 5. Sterowanie robolów przemysłowych 5. Sterowanie robolów przemysłowych łącznika K3 - linia
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
P1080287 7. Napędy robolów przemysłowych (/). Pochylenie korpusu kiści R( następuje od silnika (S2)
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
HPIM0871 8. Urządzenia chwytające robolów przemysłowych a wartość kąta fi— z układu równań acos(a —
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
napędy i sterowanieNowa metoda ustawiania napędów przemysłowych1. Wstęp Jednym z najważniejszych
więcej podobnych podstron