P1080271
7
Napędy robotów przemysłowych
7.1. Przeznaczenie napędów i zakres ich działania
Pod nazwą napęd, a precyzyjniej układ napędowy, rozumie się układ przenoszący energię z sieci elektrycznej do zespołu robota (członów układu kinematycznego lub chwytaka) i składający się z:
- układu zasilającego i sterującego pracą silnika napędowego,
- silnika napędowego (serwomotoru) będącego źródłem energii mechanicznej,
- przekładni mechanicznej łączącej silnik z zespołem robota, spełniającej zadanie mechanizmu do zmiany ilości i rodzaju ruchu (przekładnie redukcyjne), a gdy silnik wykonuje ruch obrotowy są stosowane przekładnie przekształcające ruch obrotowy na postępowy (koło zębate-ze-batka, przekładnia śrubowa toczna).
W robotach dla każdego stopnia swobody (każdej pary kinematycznej) I stosuje się oddzielny napęd do zmiany współrzędnej położenia odpowiadającej temu stopniowi.
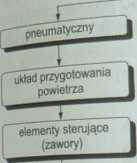
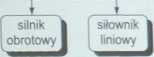
W zależności od rodzaju energii wykorzystywanej do wprawiania w ruch J mechanizmów robota rozróżnia się zespoły napędowe: pneumatyczne. elek- I trohydrauliczne i elektryczne.
Klasyfikację napędów stosowanych w robotach przemysłowych przedsta-wiono na rys. 7.1. Rodzaj zastosowanego napędu wynika z konstrukcji i prze* I znaczenia robota. Uwzględnia się przy tym następujące czynniki:
- charakter i wielkość obciążenia napędu,
- parametry kinematyczne robota, tj. przemieszczenia, prędkości i przy* I spieszenia, liczbę punktów i dokładność pozycjonowania albo odtwa* I rżani a trajektorii,
- fizyczne cechy obiektu manipulacji (twardy, kruchy, ciekły),
- warunki eksploatacyjne robota (okres pracy, ekonomiczność) i Pr/Ł'1^' I wszystkim charakterystykę otaczającego środowiska, tj. niebezpieczen* I
Napędy robotów przemysłowych
^^etetoohydraulian^^ j^^^eteldtyczn^
serwozawor
|
siłowniki | |
|
liniowe wahadłowe |
obrotowe |
[ zasilacz hydrauliczny
prądu stałego
|
tyrystorowy zasilacz 1 prądu stałego | |
|
silnik prądu stałego | |
|
komutato rowy |
bezkomuta- torowy |
|
prądu przemiennego ] |
skokowy | |
|
_l_ i | ||
|
układ prostowniczy |
impulsowy zasilacz I | |
|
' |
_ |
elektroniczny |
|
falownik |
_i__ | |
|
i t | ||
|
silnik serwonapędowy | 1 |
i silnik serwonapędowy 1 | |
|
wysokoobrotowy |
wysokomomentowy | |
silnik liniowy
Rysunek _
Podział napędów robotów przemysłowych
stwo pożaru, zanieczyszczenie, temperaturę, oddziaływania mechaniczne i inne.
Charakterystyki energetyczne, dokładnościowe i dynamiczne robotów w znacznym stopniu zależą od rodzaju zastosowanego napędu. Oprócz tego rodzaj napędu określa zarówno możliwości układu sterowania, jak i stopień inteligencji maszynowej robota.
Obecnie większość robotów jest wyposażona w napędy elektry czne i tylko w nielicznych robotach przemysłowych jest stosowany napęd pneumaty czny, a bardzo rzadko hydrauliczny. Należy podkreślić, że napędy elektryczne charakte-ty^jąsię stosunkowo dużą całkowitą spraw nością przetw arzania energii i dlate-
189
Wyszukiwarka
Podobne podstrony:
HPIM0824 6. Napędy robolów przemytlowych 6.1. Przeznaczenie napędów i zakres ich
55128 P1080239 5. Sterowanie robotów przemysłowych hiperbola, elipsa). Przeznaczona jest szczególnie
P1080210 3. Budowa robotów przemysłowych Możliwość wyboru z różnych układów napędowych pokazano na r
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
P1080294 6. Etektory robotów przemysłowych spieszeń. Poprawne uchwycenie oznacza unieruchomienie obi
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
więcej podobnych podstron