P1080294

6. Etektory robotów przemysłowych
spieszeń. Poprawne uchwycenie oznacza unieruchomienie obiektu w najbardz' • niekorzystnych warunkach dynamicznych. C|
Trzymanie obiektu w trakcie trwania czynności manipulacyjnych może być związane z takimi operacjami, jak:
- kontrola obecności obiektu w urządzeniu chwytającym,
- kontrola poprawności zamocowania obiektu w chwytaku,
- regulacja siły chwytu.
Uwolnienie obiektu manipulacji w miejscu docelowym może być zwią-zane z:
- koniecznością rozpoznania miejsca, w którym należy umieścić obiekt manipulacji (a więc wykonania ewentualnych przemieszczeń korekcyj. nych),
- koniecznością pomiaru i ewentualnie sterowania sił i momentów powstających na skutek zetknięcia się trzymanego obiektu z podłożem.
W końcowej fazie uwolnienia następuje zmniejszenie wartości siły chwytu i przemieszczenie mechanizmu wykonawczego, powodującego rozwarcie końcówek chwytnych.
8.2. Klasyfikacja i charakterystyka urządzeń chwytających
Konieczność przystosowania robotów przemysłowych do manipulowania obiektami o znacznie różniących się parametrach, np. kineskopów telewizyjnych, elementów maszyn, odlewów ciśnieniowych, wyprasek z tworzyw sztucznych itp.. spowodowała, że powstały konstrukcje urządzeń chwytających różniące się zasadą działania, zjaw iskami fizycznymi zachodzącymi w trakcie chwytania, sposobem chwytania itp. [3]. Klasyfikację chwytaków robotów przemysłowych pokazano na rys. 8.1.
Rozróżnia się następujące rodzaje chwytania przedmiotu:
— chwytanie przez obejmowanie {kształtowe),
— chwytanie cierne {siłowe),
— chwytanie przez przyssanie,
— chwytanie magnetyczne.
Chwytanie przez obejmowanie przedmiotu manipulacji i chwytanie cierne wykonuje się za pomocą chwytaków, zwanych dalej chwytakami mechanicznymi. natomiast chwytanie przez przyssanie — za pomocą chwytaków podciśnieniowych, a chwytanie magnetyczne - chwytaków magnetycznych.
Racjonalny dobór chwytaka do konkretnego zadania technologicznego ma decydujące znaczenie dla poprawnego procesu manipulacji. Etapy doboru są następujące:
1) dokonanie wstępnego wyboru typu chwytaka (zasady działania), odpowiedniego do danego kształtu obiektu,
2) dobranie parametrów konstrukcyjnych wybranego typu chwytaka.

8.2. Klasyfikacja i charakterystyka urządzeń chwytających
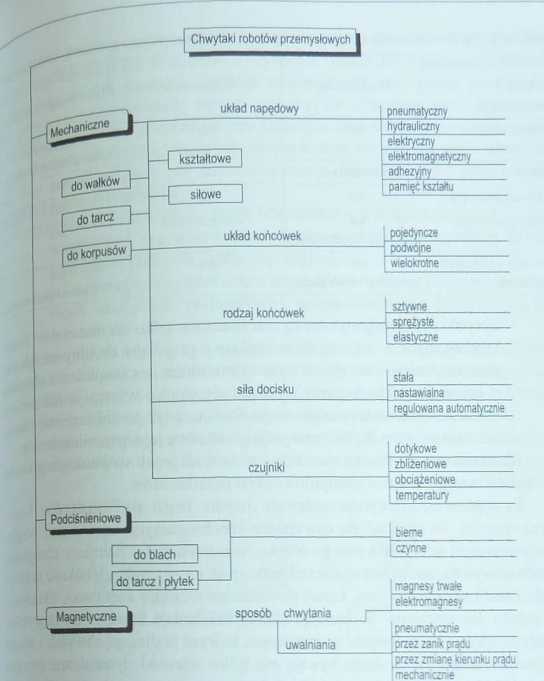
Rysunek^_
Klasyfikacja chwytaków robotów przemysłowych
Podczas wstępnego wyboru typu chwytaka należy określić najbardziej niezawodny sposób chwytania danego obiektu, przy czym głównym wyróżnikiem jest jego kształt. Przykłady podstawowych kształtów obiektu manipulacji oraz możliwości użycia różnych typów chwytaków przedstawiono w tabl. 8.1.
Ze względu na prostą konstrukcję chwytaków podciśnieniowych oraz elek-^niagnetycznych są one chętnie stosowane, ale należy zwrócić uwagę na to, że:
- chwytaki podciśnieniowe mogą być stosowane tylko w przypadku obiektów mających powierzchnię o określonej gładkości i płaskości, które nie są zabrudzone (opiłki, kurz i inne zanieczyszczenia mogą spowodować nieszczelność); trwałość przyssawki jest niewielka, a w procesie manipulacji zmienia się dokładność pozycjonowania obiektu, 235
Wyszukiwarka
Podobne podstrony:
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
więcej podobnych podstron