45696 P1080272
7. Napędy robotów przemysłowych
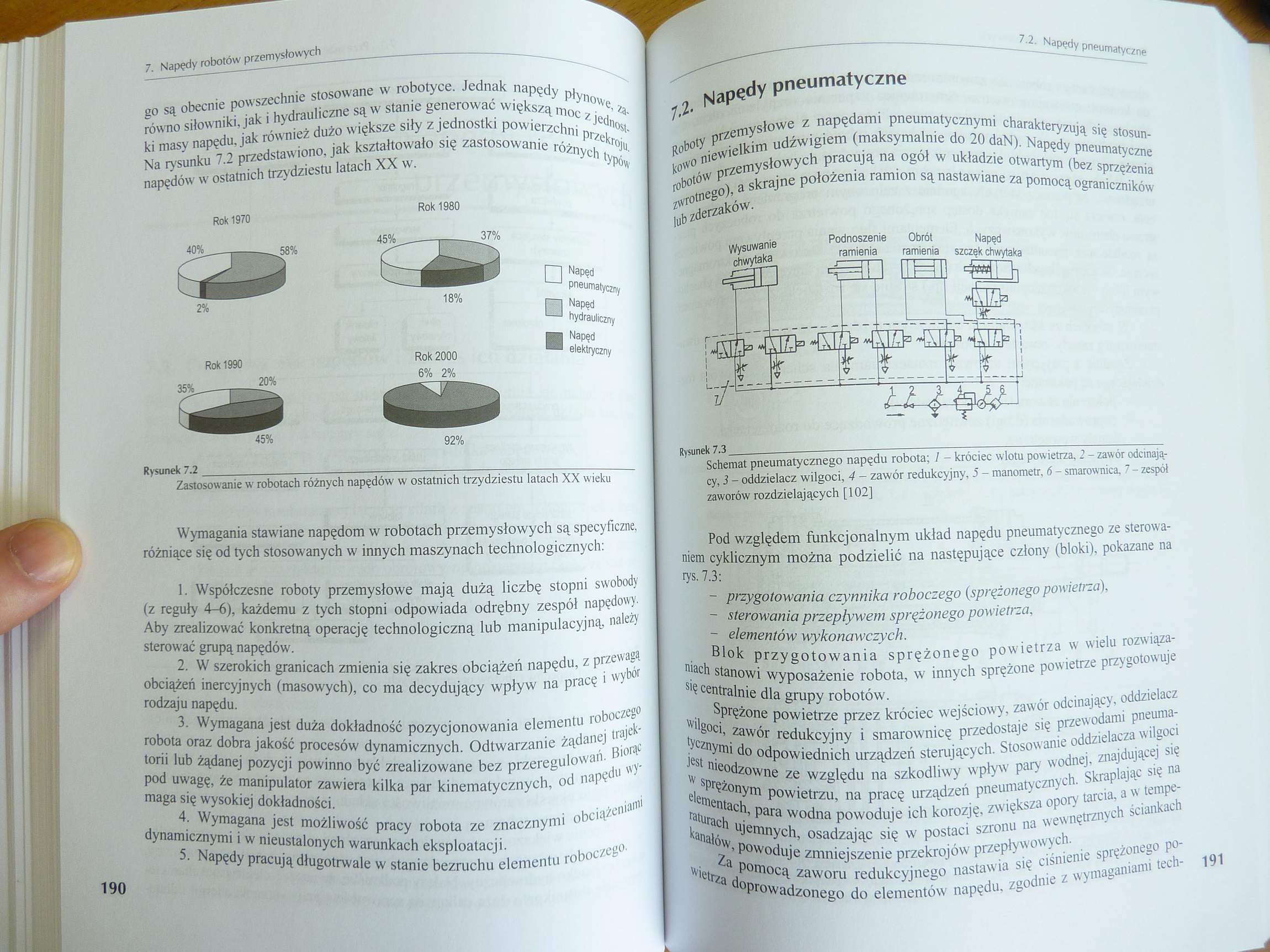
go są obecnie powszechnie stosowane w robotyce. Jednak napędy płynowe, -/Ą równo siłowniki, jak i hydrauliczne są w stanie generować większą moc zjednog. ki masy napędu, jak również dużo większe siły z jednostki powierzchni przekroju Na rysunku 7.2 przedstawiono, jak kształtowało się zastosowanie różnych typów napędów w ostatnich trzydziestu latach XX w.
Rok 1970

2%
Rok 1980

□
■
Napęd
pneumatyczny
Napęd
hydrauliczny
■ Napęd elektryczny
Rok 1990

45%
Rok 2000 6% 2%

92%
Rysunek L .5.___
Zastosowanie w robotach różnych napędów w ostatnich trzydziestu latach XX wieku
Wymagania stawiane napędom w robotach przemysłowych są specyficzne, I różniące się od tych stosowanych w innych maszynach technologicznych: 1 2 3 4 5
7.2. Napędy pneumatyczne
Roboty przemysłowe z napędami pneumatycznymi charakteryzują się stosunkowo niewielkim udźwigiem (maksymalnie do 20 daN). Napędy pneumatyczne robotów przemysłowych pracują na ogół w układzie otwartym (bez sprzężenia zwrotnego), a skrajne położenia ramion są nastawiane za pomocą ograniczników lub zderzaków.
Wysuwanie Podnoszenie Obrót Napęd
chwytaka ramienia ramienia szczęk chwytaka
Mg3 «] pUJ ■SQ
|
m | ||||||
|
i |
M |
I |
t£MIM |
W f |
p3' F |
Rysunek'^_
Schemat pneumatycznego napędu robota; 1 - króciec wlotu powietrza, 2 - zawór odcinający, i ^oddzielacz wilgoci, 4 - zawór redukcyjny, 5 - manometr, 6 - smarownica, 7 - zespół zaworów rozdzielających [102]
Pod względem funkcjonalnym układ napędu pneumatycznego ze sterowaniem cyklicznym można podzielić na następujące człony (bloki), pokazane na rys. 7.3:
- przygotowania czynnika roboczego (sprężonego powietrza),
- sterowania przepływem sprężonego powietrza,
- elementów ytykonawczych.
Blok przygotowania sprężonego powietrza w wielu rozwiązaniach stanowi wyposażenie robota, w innych sprężone powietrze przygotowuje się centralnie dla grupy robotów.
Sprężone powietrze przez króciec wejściowy, zawór odcinający, oddzielacz wilgoci, zawór redukcyjny i smarownicę przedostaje się przewodami pneumatycznymi do odpowiednich urządzeń stemjących. Stosowanie oddzielacza wilgoci jest nieodzowne ze względu na szkodliwy wpływ pary wodnej, znajdującej się w sprężonym powietrzu, na pracę urządzeń pneumatycznych. Skraplając się na elementach, para wodna powoduje ich korozję, zwiększa opory tarcia, a w temperaturach ujemnych, osadzając się w postaci szronu na wewnętrznych ściankach kanałów, powoduje zmniejszenie przekrojów przepływowych.
Za pomocą zaworu redukcyjnego nastawia się ciśnienie sprężonego powietrza prowadzonego do elementów napędu, zgodnie z wymaganiami tech- 191
Współczesne roboty przemysłowe mają dużą liczbę stopni swobody I (z reguły 4-6), każdemu z tych stopni odpowiada odrębny zespół napędowy. I Aby zrealizować konkretną operację technologiczną lub manipulacyjną należy I sterować grupą napędów.
W szerokich granicach zmienia się zakres obciążeń napędu, z przewagą! obciążeń inercyjnych (masowych), co ma decydujący wpływ na pracę i wybór! rodzaju napędu.
Wymagana jest duża dokładność pozycjonowania elementu roboczego! robota oraz dobra jakość procesów dynamicznych. Odtwarzanie żądanej trajek-l torii lub żądanej pozycji powinno być zrealizowane bez przeregulowań. Biorąc! pod uwagę, że manipulator zawiera kilka par kinematycznych, od napędu wy*| maga się wysokiej dokładności.
Wymagana jest możliwość pracy robota ze znacznymi obciążeniami dynamicznymi i w nieustalonych warunkach eksploatacji.
Napędy pracują długotrwale w stanie bezruchu elementu roboczego.
Wyszukiwarka
Podobne podstrony:
88696 P1080293 8Efektory robotów przemysłowych Niezbędnym wyposażeniem robota przemysłowego są efekt
P1080269 6. Programowanie robotów przemysłowych HI. Dwie komórki sieci są ze sobą połączone, jeśli
41895 P1080251 5. Sterowanie robotów przemysłowych W metodzie fotooptycznej są stosowane fotokomórki
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
P1080294 6. Etektory robotów przemysłowych spieszeń. Poprawne uchwycenie oznacza unieruchomienie obi
LastScan17 (7) Ciągadła stożkowe i lukowe są obecnie najczęściej stosowanymi ciągadłami w produkcji
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
więcej podobnych podstron