13248 P1080299
8. Efektory robotów przemysłowych
01O5±O,2
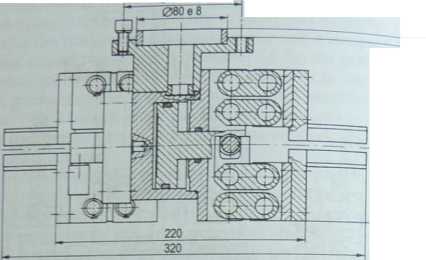
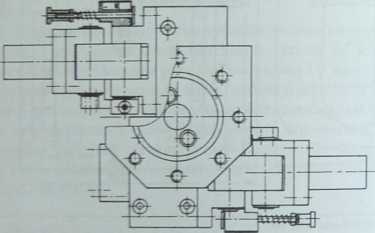
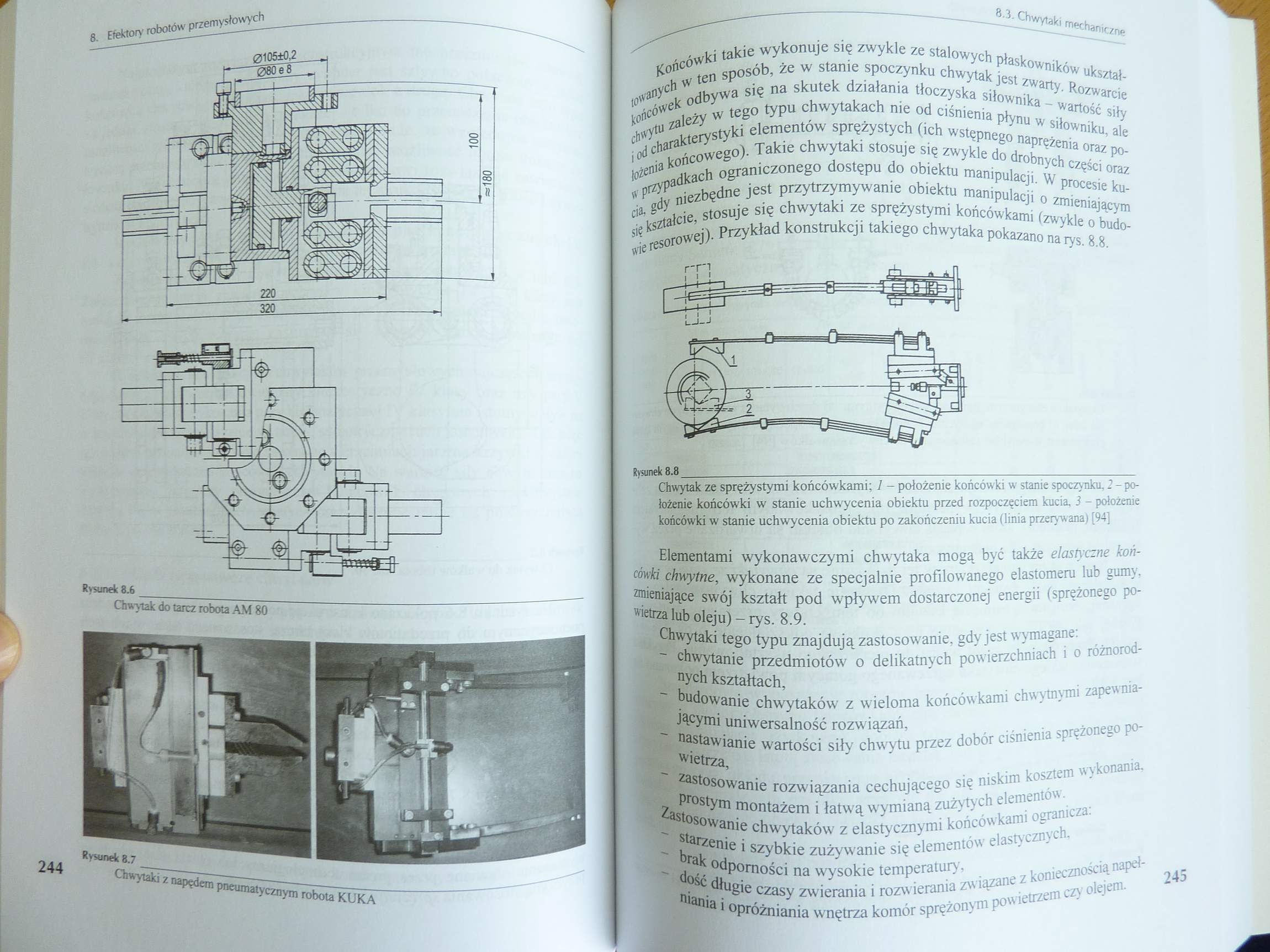
Rysunek 8.6_
Chwytak do tarcz robola AM 80
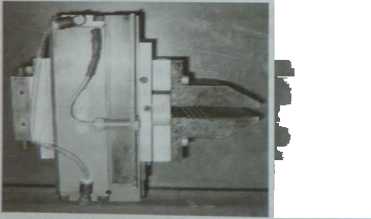
Rysunek 8.7__
Chwytaki z napędem pneumatycznym robota KUKA
Końcówki takie wykonuje się zwykle ze stalowych płaskowników ukształtowanych w ten sposób, że w stanie spoczynku chwytak jest zwarty. Rozwarcie końcówek odbywa się na skutek działania tłoczyska siłownika - wartość siły chwytu zależy w tego typu chwytakach nie od ciśnienia płynu w siłowniku, ale i od charakterystyki elementów sprężystych (ich wstępnego naprężenia oraz położenia końcowego). Takie chwytaki stosuje się zwykle do drobnych części oraz w przypadkach ograniczonego dostępu do obiektu manipulacji. W procesie kucia, gdy niezbędne jest przytrzymywanie obiektu manipulacji o zmieniającym się kształcie, stosuje się chwytaki ze sprężystymi końcówkami (zwykle o budowie resorowej). Przykład konstrukcji takiego chwytaka pokazano na rys. 8.8.
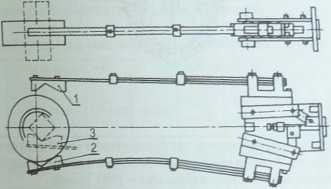
Rysunek 8.8^_
Chwytak ze sprężystymi końcówkami; 1 — położenie końcówki w stanie spoczynku, 2 - położenie końcówki w stanie uchwycenia obiektu przed rozpoczęciem kucia, 3 - położenie końcówki w stanie uchwycenia obiektu po zakończeniu kucia (linia przerywana) [94]
Elementami wykonawczymi chwytaka mogą być także elastyczne końcówki chwytne, wykonane ze specjalnie profilowanego elastomeru lub gumy, zmieniające swój kształt pod wpływem dostarczonej energii (sprężonego powietrza lub oleju) - rys. 8.9.
Chwytaki tego typu znajdują zastosowanie, gdy jest wymagane:
chwytanie przedmiotów o delikatnych powierzchniach i o różnorodnych kształtach,
budowanie chwytaków z wieloma końcówkami chwytnymi zapewniającymi uniwersalność rozwiązań,
nastawianie wartości siły chwytu przez dobór ciśnienia sprężonego po-g- Wietrzą,
** ‘'zastosowanie rozwiązania cechującego się niskim kosztem wykonania, prostym montażem i łatwą wymianą zużytych elementów.
Zastosowanie chwytaków z elastycznymi końcówkami ogranicza:
" starzenie i szybkie zużywanie się elementów elastycznych.
- brak Odporności na wysokie temperatury,
~ dość długie czasy zwierania i rozwierania związane z koniecznością napełniania i opróżniania wnętrza komór sprężonym powietrzem czy olejem.
245
Wyszukiwarka
Podobne podstrony:
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080297 8. Efektory robotów przemysłowych Podziału tego dokonano ze względu na występowanie w układ
P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w mecha
15107 P1080295 B. Efektory robotów przemysłowych Tablica 8.t. Przykładowe kształty obiektów manipula
P1080212 3. Budowa robotów przemysłowych Platforma Rysunek 3.34_ Platforma Stewarta [ 107] Platforma
P1080297 8. Efektory robotów przemysłowych Podziału tego dokonano ze względu na występowanie w układ
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
P1080241 5. Sterowanie robotów przemysłowych Rysunek S.4_____ Klasyfikacja układów sterowania robotó
więcej podobnych podstron