P1080297

8. Efektory robotów przemysłowych
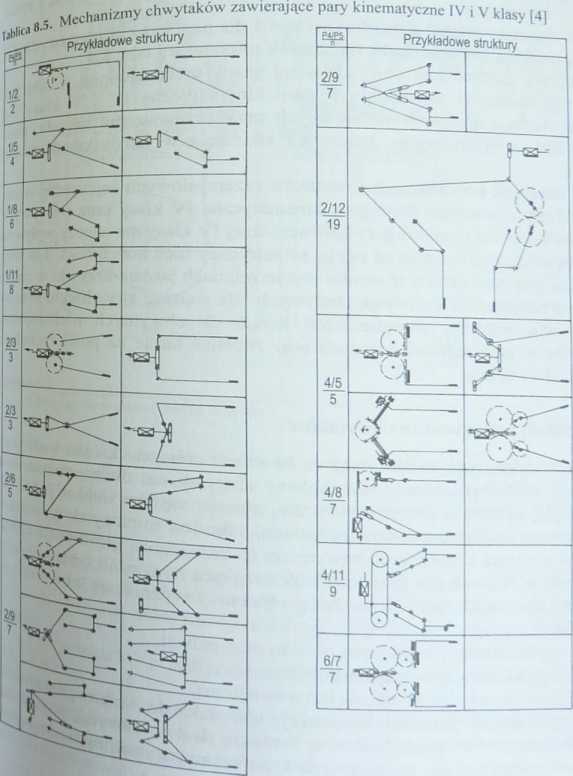
Podziału tego dokonano ze względu na występowanie w układach przeniesienia napędu tak charakterystycznych par kinematycznych IV klasy, jak krzywki i przekładnie zębate (np. zębatka—koło zębate), obok członów poruszających się względem siebie obrotowo lub prostoliniowo. Obie grupy mechanizmów są w pewnym sensie grupami równoważnymi, ze względu na możliwość zastąpienia pary kinematycznej IV klasy odpowiednim układem par kinematycznych V klasy (i odwrotnie).
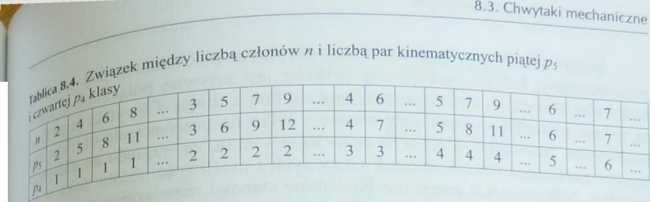
Mechanizmy płaskie o ruchliwości w = 1 mogą więc zawierać liczbę ruchomych członów oraz par kinematycznych V klasy według tabl. 8.2.
Tablica 8.2. Związek między liczbą członów n i liczbą par kinematycznych piątej klasy ps
|
n |
1 |
3 |
5 |
7 |
9 |
11 |
13 | |
|
Ps |
1 |
4 |
7 |
10 |
13 |
16 |
19 |
J |
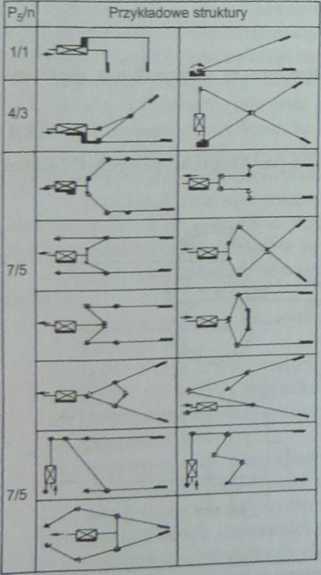
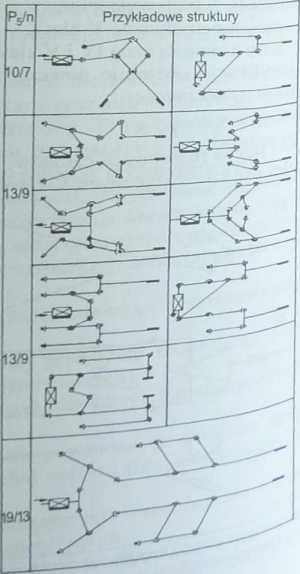
Typowe mechanizmy chwytaków przedstawiono w tabl. 8.3. Tablica 8.3. Mechanizmy chwytaków zawierające pary kinematyczne tylko V klasy [4]
Wyszukiwarka
Podobne podstrony:
P1080297 8. Efektory robotów przemysłowych Podziału tego dokonano ze względu na występowanie w układ
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
15107 P1080295 B. Efektory robotów przemysłowych Tablica 8.t. Przykładowe kształty obiektów manipula
zasobu). Elastycznością tego zasobu ze względu na zmienne y i x nazwiemy iloraz względnej zmiany war
Pojęcie układów optycznych Podział układów optycznych ze względu na: •dokładność tworzenia
phoca thumb l slajd18 Podział naczyń włosowatych ze względu na budowę ściany: ciągłość, pory, błona
koagulacja3 Podział roztworów koloidalnych Ze względu na powinowactwo fazy rozproszonej do rozprasza
IMAG1192 WPKMetody walcowania (1) Ryv Podział metod WPK ze względu na przebieg procesu: a) walcowani
Podział przetworników i przyrządów Ze względu na spełnianie funkcje rozróżnia się: Miernik -
więcej podobnych podstron