15107 P1080295
B. Efektory robotów przemysłowych
Tablica 8.t. Przykładowe kształty obiektów manipulacji i zalecane rodzaje urządzeń chwytający^
|
Chwytak Obiekt^. 1 manipulacji |
Mechaniczny |
Podciśnieniowy |
Elektromagnetyczny |
|
1 Walki, tulejki |
tak |
nie |
warunkowo (tylko płaskie krążki) |
|
[Płytki |
warunkowo |
tak |
tak |
|
Arkusze blach, płyty |
nie |
tak |
tak |
|
Prostopadłościany |
tak (specjalne konstrukcje) |
warunkowo |
tak |
|
Obiekty o złożonych kształtach_ |
tak (specjalne konstrukcje) |
nie |
tok [z wieloma magnesami) |
- chwytaki elektromagnetyczne są przeznaczone tylko do materiałów ferromagnetycznych, a magnetyzm szczątkowy przyciąga drobiny metalowe, przez co zmniejsza się siła chwytu i utrudnione jest uwolnienie obiektu; w uzwojeniu elektromagnesu wydziela się ciepło, występuje też zmiana dokładności położenia początkowego obiektu, gdyż po zbliżeniu się chwytaka na określoną odległość następuje gwałtowne jego przemieszczenie. Chwytania magnetycznego nie można stosować, jeżeli technologia procesu nie dopuszcza magnesowania manipulowanych przedmiotów.
Po wyborze typu chwytaka następuje dobór jego parametrów konstrukcyjnych. Na przykład dla chwytaków mechanicznych istotne pod względem poprawności uchwycenia danego obiektu manipulacji są: rozmiary chwytaka, sposób uchwycenia, zakres przemieszczeń końcówek chwytnych, głębokość uchwycenia. kształt końcówki chwytnej, kształt powierzchni roboczej końcówki, siła chwytu, rodzaj i ilość czujników. Wybierając zasadę działania i konstrukcję chwytaka, należy uwzględnić oddziaływania wymuszające, którym podlegają chwytak i obiekt w procesie manipulacji. Zmienne bywają nie tylko warunki dynamiczne procesu manipulacji, lecz również takie czynniki, jak: temperatura, zapylenie, wilgotność otoczenia, stan powierzchni obiektu manipulacji (jakość obróbki, zaoliwienie itp.).
8.3. Chwytaki mechaniczne
Chwytaki mechaniczne są najczęściej stosowane do zadań transportowania i manipulacji. Użytkownik robota, aby użyć odpowiedniego chwytaka mechanicznego, może:
- zakupić go w wyspecjalizowanej firmie zajmującej się produkcją urzą* dzeń chwytających lub
- zaprojektować własny chwytak przeznaczony na swoje potrzeby, lecz jest to kosztowne i czasochłonne.
Rozróżnia się chwytanie przedmiotów przez obejmowanie (kształtowe) 236 i chwytanie cierne (siłowe).
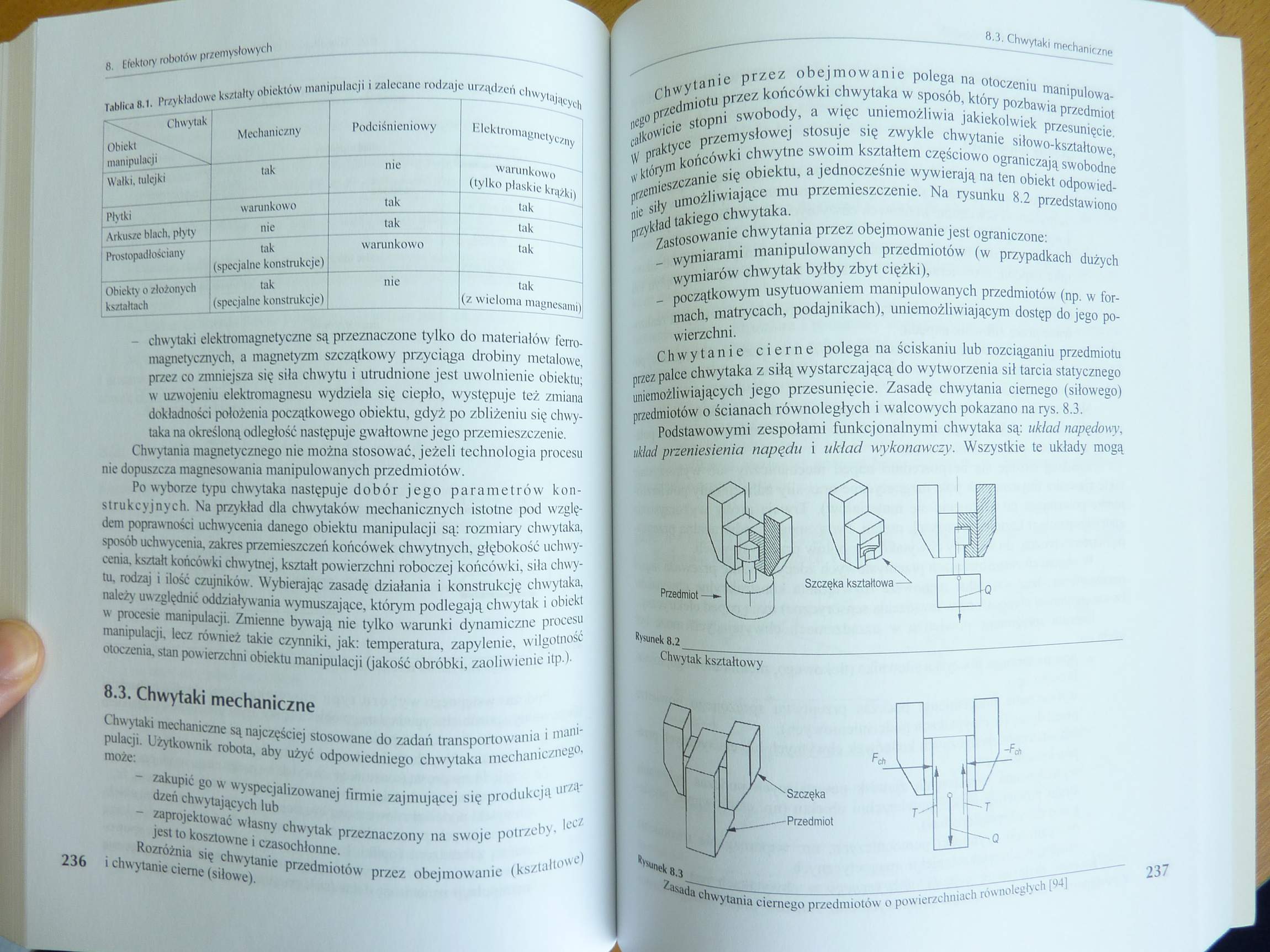
Chwytanie przez obejmowanie polega na otoczeniu manipulowanego przedmiotu przez końcówki chwytaka w sposób, który pozbawia przedmiot całkowicie stopni swobody, a więc uniemożliwia jakiekolwiek przesunięcie. W praktyce przemysłowej stosuje się zwykle chwytanie siłowo-kształtowe, w którym końcówki chwytne swoim kształtem częściowo ograniczają swobodne przemieszczanie się obiektu, a jednocześnie wywierają na ten obiekt odpowiednie siły umożliwiające mu przemieszczenie. Na rysunku 8.2 przedstawiono przykład takiego chwytaka.
Zastosowanie chwytania przez obejmowanie jest ograniczone:
- wymiarami manipulowanych przedmiotów (w przypadkach dużych wymiarów chwytak byłby zbyt ciężki);,
- początkowym usytuowaniem manipulowanych przedmiotów (np. w formach, matrycach, podajnikach), uniemożliwiającym dostęp do jego po-
'■^erzchni.
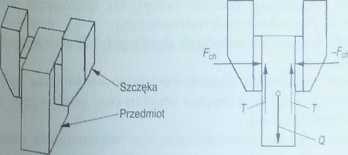
Chwytanie cierne polega na ściskaniu lub rozciąganiu przedmiotu przez palce chwytaka z siłą wystarczającą do wytworzenia sił tarcia statycznego uniemożliwiających jego przesunięcie. Zasadę chwytania ciernego (siłowego) przedmiotów o ścianach równoległych i walcowych pokazano na rys. 8.3.
Podstawowymi zespołami funkcjonalnymi chwytaka są: układ napędowy, układ przeniesienia napędu i układ wykonawczy. Wszystkie te układy mogą

Rysunek 8.2
Chwytak kształtowy
tysuijef

Wyszukiwarka
Podobne podstrony:
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
P1080297 8. Efektory robotów przemysłowych Podziału tego dokonano ze względu na występowanie w układ
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
P1080206 3. Budowa robotów przemysłowych Tablica 3.2. Specyfikacja techniczna wybranych profili firm
P1080297 8. Efektory robotów przemysłowych Podziału tego dokonano ze względu na występowanie w układ
88696 P1080293 8Efektory robotów przemysłowych Niezbędnym wyposażeniem robota przemysłowego są efekt
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
P1080294 6. Etektory robotów przemysłowych spieszeń. Poprawne uchwycenie oznacza unieruchomienie obi
więcej podobnych podstron