P1080206
3. Budowa robotów przemysłowych
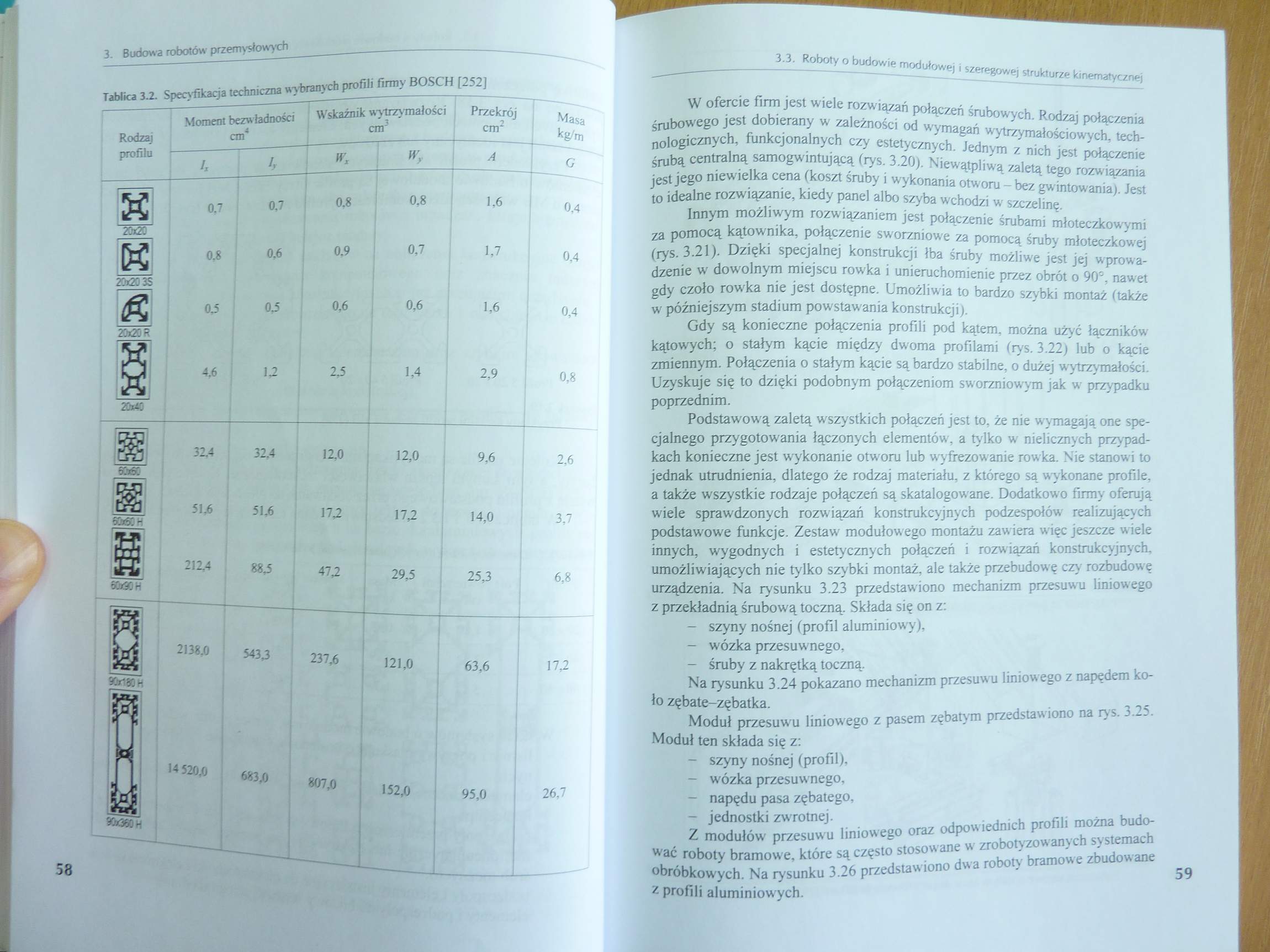
Tablica 3.2. Specyfikacja techniczna wybranych profili firmy BOSCH [252]
|
Rodzaj |
Moment bezwładności i cm4 |
Wskaźnik wytrzymałości > cm3 |
Przekrój cm2 |
i Masa J kg/rn | ||
|
profilu f- |
4 |
4 |
wx |
Wy 1 |
A | |
|
K 20X20 |
0,7 |
0,7 |
0,8 |
0,8 |
1,6 |
0,4 |
|
K 20x20 3S |
03 |
Ofi |
0,9 |
0,7 |
1,7 |
1 0,4 |
|
fi 20x20R |
03 |
03 |
0,6 |
0,6 |
1,6 |
E', o,4 |
|
20x40 |
4.6 ] |
13 |
23 |
U |
2,9 |
1 0,8 |
32.4 32.4 12,0
9,6
12,0
era
51,6 51,6 172
17,2
14.0 1 3,7
212.4 883 47,2 293
25.3
60x30 H
2B8,0 5433 237,6 121,0 63,6 17^
90x180 H
HE
• i
34 520,0 J 683,0 j 807,0 1 152,0 1 95,0
26,7
o
je i
90*380H
W ofercie firm jest wiele rozwiązań połączeń śrubowych. Rodzaj połączenia śrubowego jest dobierany w zależności od wymagań wytrzymałościowych, technologicznych, funkcjonalnych czy estetycznych. Jednym z nich jest połączenie śrubą centralną samogwintującą (rys. 3.20). Niewątpliwą zaletą tego rozwiązania jest jego niewielka cena (koszt śruby i wykonania otworu - bez gwintowania). Jest to idealne rozwiązanie, kiedy panel albo szyba wchodzi w szczelinę.
Innym możliwym rozwiązaniem jest połączenie śrubami młoteczkowymi za pomocą kątownika, połączenie sworzniowe za pomocą śmby młoteczkowej (rys. 3.21). Dzięki specjalnej konstrukcji łba śmby możliwe jest jej wprowadzenie w dowolnym miejscu rowka i unieruchomienie przez obrót o 90°. nawet gdy czoło rowka nie jest dostępne. Umożliwia to bardzo szybki montaż (także w późniejszym stadium powstawania konstrukcji).
Gdy są konieczne połączenia profili pod kątem, można użyć łączników kątowych; o stałym kącie między dwoma profilami (rys. 3.22) lub o kącie zmiennym. Połączenia o stałym kącie są bardzo stabilne, o dużej wytrzymałości. Uzyskuje się to dzięki podobnym połączeniom sworzniowym jak w przypadku poprzednim.
Podstawową zaletą wszystkich połączeń jest to, że nie wymagają one specjalnego przygotowania łączonych elementów, a tylko w nielicznych przypadkach konieczne jest wykonanie otworu lub wyfrezowanie rowka. Nie stanowi to jednak utrudnienia, dlatego że rodzaj materiału, z którego są wykonane profile, a także wszystkie rodzaje połączeń są skatalogowane. Dodatkowo firmy oferują wiele sprawdzonych rozwiązań konstrukcyjnych podzespołów realizujących podstawowe funkcje. Zestaw modułowego montażu zawiera więc jeszcze wiele innych, wygodnych i estetycznych połączeń i rozwiązań konstrukcyjnych, umożliwiających nie tylko szybki montaż, ale także przebudowę czy rozbudowę urządzenia. Na rysunku 3.23 przedstawiono mechanizm przesuwu liniowego z przekładnią śrubową toczną. Składa się on z:
- szyny nośnej (profil aluminiowy),
- wózka przesuwnego,
- śruby z nakrętką toczną.
Na rysunku 3.24 pokazano mechanizm przesuwu liniowego z napędem koło zębate-zębatka.
Moduł przesuwu liniowego z pasem zębatym przedstawiono na rys. 3.25. Moduł ten składa się z:
- szyny nośnej (profil),
- wózka przesuwnego,
- napędu pasa zębatego,
- jednostki zwrotnej.
Z modułów przesuwu liniowego oraz odpowiednich profili można budować roboty bramowe, które są często stosowane w zrobotyzowanych systemach obróbkowych. Na rysunku 3.26 przedstawiono dwa roboty bramowe zbudowane z profili aluminiowych.
59
Wyszukiwarka
Podobne podstrony:
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
15107 P1080295 B. Efektory robotów przemysłowych Tablica 8.t. Przykładowe kształty obiektów manipula
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
P1080203 3. Budowa robotów przemysłowych siywane do napędu następnych stopni swobody. W obudowie zna
więcej podobnych podstron