45482 P1080304
8. Efektory robotów przemysłowych

F
Ws
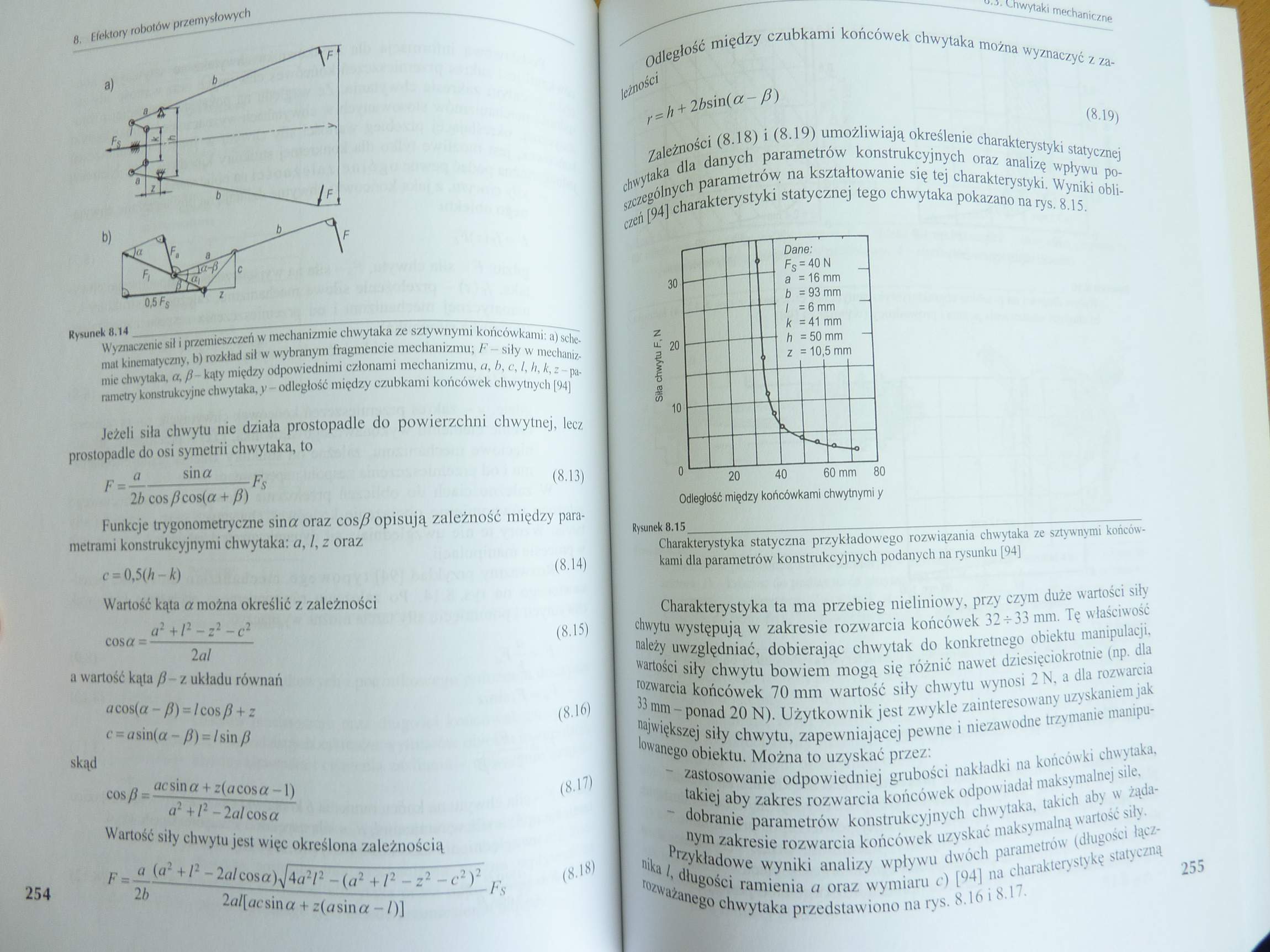
Rysunek 8.14
Wyznaczenie sił i przemieszczeń w mechanizmie chwytaka ze sztywnymi końcówkami: a) schemat kinematyczny, b) rozkład sił w wybranym fragmencie mechanizmu; F - siły w mechanizmie chwytaka, a, fi- kąty między odpowiednimi członami mechanizmu, a, b, c, I, h,k,z- pa* rametry konstrukcyjne chwytaka, y - odległość między czubkami końcówek chwytnych [94]
Jeżeli siła chwytu nie działa prostopadle do powierzchni chwytnej, lecz prostopadle do osi symetrii chwytaka, to
(8.13)
Funkcje trygonometryczne sina oraz cos/? opisują zależność między parametrami konstrukcyjnymi chwytaka: a, /, z oraz
c = Q,$(h-k)
Wartość kąta a można określić z zależności
(8.14)
(8.15)/;
a wartość kąta p-z układu równań flcos(a-j?)=/eosy? + r c*asin(a-/?)s/sin/?
skąd

a2 +/2 - lal cos a
(8.17)
254
Wartość siły chwytu jest więc określona zależnością
a (ia2 -ł* I1 - 2fl/cosa)^4fl2:/2 - (a2 +12 - z2 -c2)* 2b
2o/[acsina + z(a sin a - /)]
między
czubkami końcówek chwytaka można wyznaczyć z za-
rs5/j + 2fcsin(a-/?) (8.19)
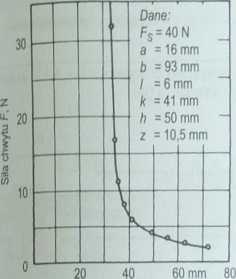
Zależności (8.18) i (8.19) umożliwiają określenie charakterystyki statycznej vtaka dla danych parametrów konstrukcyjnych oraz analizę wpływu po-d1 Ogólnych parametrów na kształtowanie się tej charakterystyki. Wyniki obli-[9^1 charakterystyki statycznej tego chwytaka pokazano na rys. 8.15.
Odległość między końcówkami chwytnymi y
Rysunek 8.1^__
Charakterystyka statyczna przykładowego rozwiązania chwytaka ze sztywnymi końcówkami dla parametrów konstrukcyjnych podanych na iysunku [94]
Charakterystyka ta ma przebieg nieliniowy, przy czym duże wartości siły chwytu występują w zakresie rozwarcia końcówek 32*33 mm. Tę właściwość należy uwzględniać, dobierając chwytak do konkretnego obiektu manipulacji, wartości siły chwytu bowiem mogą się różnić nawet dziesięciokrotnie (np. dla rozwarcia końcówek 70 mm wartość siły chwytu wynosi 2 N, a dla rozwarcia 33 ram - ponad 20 N). Użytkownik jest zwykle zainteresowany uzyskaniem jak największej siły chwytu, zapewniającej pewne i niezawodne trzymanie manipulowanego obiektu. Można to uzyskać przez:
- zastosowanie odpowiedniej grubości nakładki na końcówki chwytaka.
takiej aby zakres rozwarcia końcówek odpowiadał maksymalnej sile.
~ dobrani? parametrów konstrukcyjnych chwytaka, takich aby w żądanym zakresie rozwarcia końcówek uzyskać maksymalną wartość siły. Przykładowe wyniki analizy wpływu dwóch parametrów (długości łącz-n,ta /, długości ramienia a oraz wymiaru c) [94] na charakterystykę statyczną r,)2waianeg0 chwytaka przedstawiono na rys. 8.16 i 8.17. 255
Wyszukiwarka
Podobne podstrony:
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w mecha
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budowę, gł
85852 P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH
87083 P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budo
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
P1080297 8. Efektory robotów przemysłowych Podziału tego dokonano ze względu na występowanie w układ
P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia perforo
P1080310 8. Efektoły robotów przentysłowych 8. Efektoły robotów przentysłowych 266 tan* L2t Rozwiąza
więcej podobnych podstron