P1080305
8. Efektory robotów przemysłowych
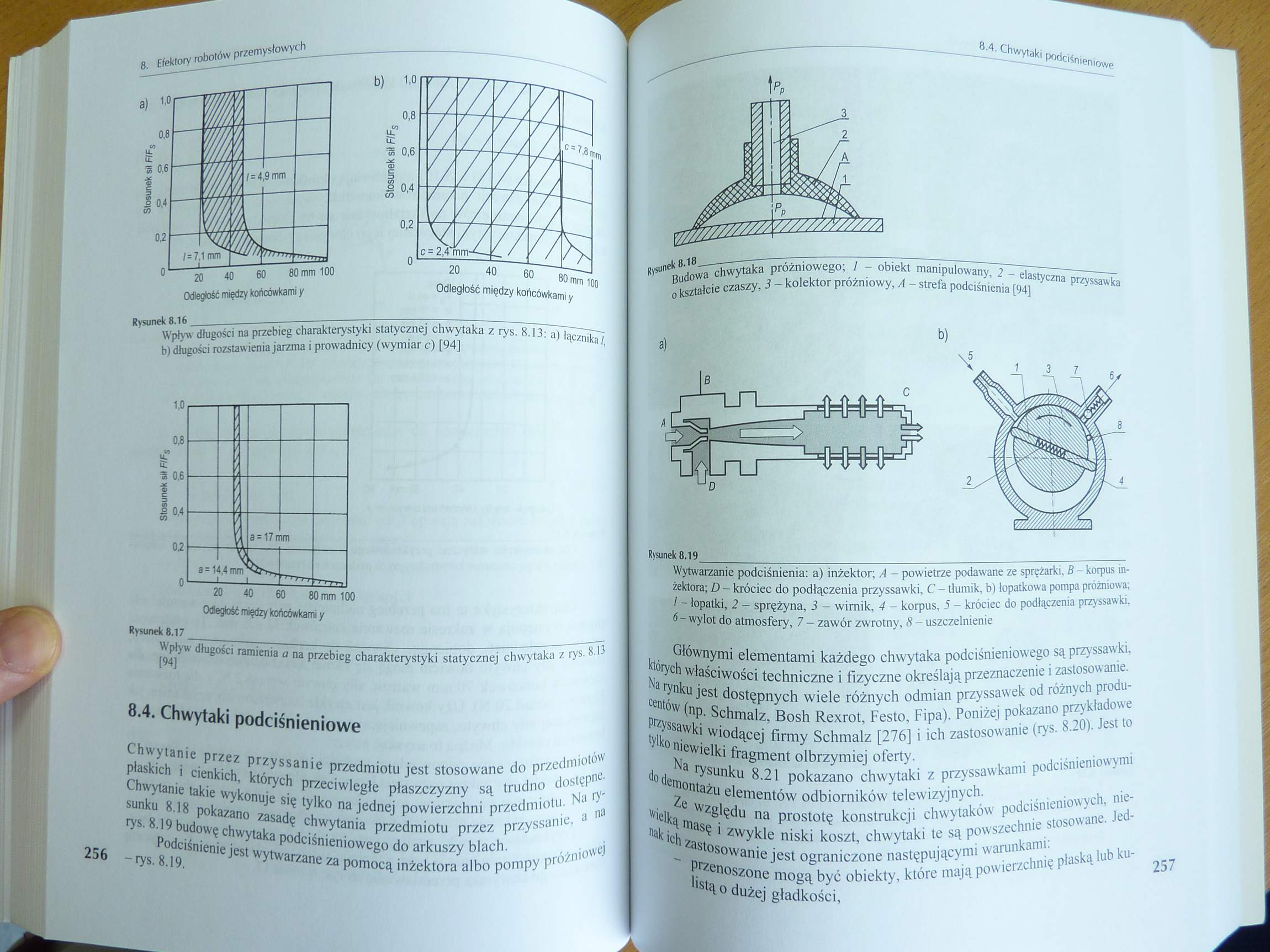
Rysunek 8.16^_
Wpływ długości na przebieg charakterystyki statycznej chwytaka z rys. 8.13: a)lą^>^ b) długości rozstawienia jarzma i prowadnicy (wymiar c) [94] /,
1.0
o»
JŁ*
u_
^ 0.6 JC
I
s 0,4 m
02
20 40 60 80 mm 100
Odległość między końcówkami y
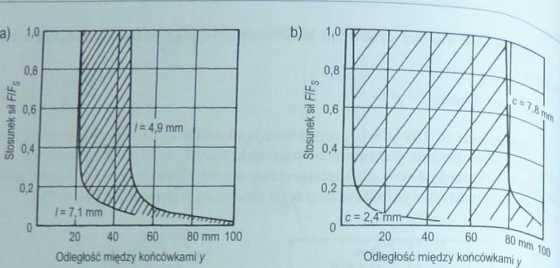
Rysunek 8.17_______
Wpływ długości ramienia a na przebieg charakterystyki statycznej chwytaka z rys. 8.13 [94]
8.4. Chwytaki podciśnieniowe
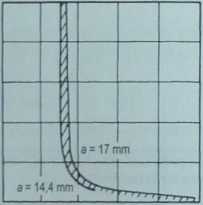
Chwytanie przez przyssanie przedmiotu jest stosowane do przedmiotów płaskich i cienkich, których przeciwległe płaszczyzny są trudno dostępne. Chwytanie takie wykonuje się tylko na jednej powierzchni przedmiotu. Na rysunku 8.18 pokazano zasadę chwytania przedmiotu przez przyssanie, a na rys. 8.19 budowę chwytaka podciśnieniowego do arkuszy blach.
Podciśnienie jest wytwarzane za pomocą inżektora albo pompy próżniowej -rys. 8.19.
o kształcie czaszy, 3 - kolektor próżniowy, A - strefa podciśnienia [94]
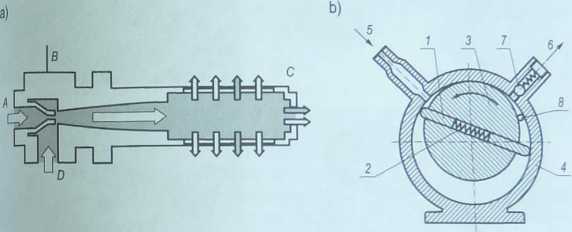
Rysunek 8.1!^_
Wytwarzanie podciśnienia: a) inżektor; A — powietrze podawane ze sprężarki, B - korpus in-źektora; D - króciec do podłączenia przyssawki, C - tłumik, b) łopatkowa pompa próżniowa; / - łopatki, 2 ^sprężyna, 3 — wirnik, 4 - korpus, 5 - króciec do podłączenia przyssawki, 6- wylot do atmosfery, 7 — zawór zwrotny, 8 — uszczelnienie
Głównymi elementami każdego chwytaka podciśnieniowego są przyssawki, których właściwości techniczne i fizyczne określają przeznaczenie i zastosowanie. Na rynku jest dostępnych wiele różnych odmian przyssawek od różnych producentów (np. Schmalz, Bosh Rexrot, Festo, Fipa). Poniżej pokazano przykładowe przyssawki wiodącej firmy Schmalz [276] i ich zastosowanie (rys. 8.20). Jest to tylko niewielki fragment olbrzymiej oferty.
Na rysunku 8.21 pokazano chwytaki z przyssawkami podciśnieniowymi do demontażu elementów odbiorników telewizyjnych.
Ze względu na prostotę konstrukcji chwytaków podciśnieniowych, nie-wielką masę i zwykle niski koszt, chwytaki te są powszechnie stosowane. Jed-nak ich zastosowanie jest ograniczone następującymi warunkami:
- przenoszone mogą być obiekty, które mają powierzchnię płaską lub kulistą o dużej gładkości,
Wyszukiwarka
Podobne podstrony:
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w mecha
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budowę, gł
85852 P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH
87083 P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budo
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
P1080356 (2) 12. Badanie dokładności robotów przemysłowych Rysunek 118___ Relacja między punktem zad
więcej podobnych podstron