P1080308
8. Efektory robotów przemysłowych
Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 1822 N siła przyssania F wynosi
Fs - Fm/n (8.26),
Fs= 1822/6 = 304 N (8.27);
Zdecydowano się na zastosowanie przyssawek typu SPU z katalogu firmy Schmaiz. dobrze nadających się do przemieszczania elementów gładkich o dużych powierzchniach. Fragment danych technicznych tych przyssawek podano w tabl. 8.9. Na podstawie wymaganej siły przyssania Fs wybrano przyssawkę typu SPU 100 G1/4-IG.
Tablica 8.9. Wybrane dane techniczne płaskich przyssawek SPU [276]
|
1 v;' 'i Typ |
Siła przyssania F$ |
Objętość |
Min. promień krzywizny powierzchni |
Zalecana średnica przewodu |
|
N |
cm3 |
mm |
mm | |
|
SPU 100G1/4-JG |
380 |
40 |
130 |
9 |
|
SPU 125 G1/4-1G |
620 |
' 70 |
, | 220 |
9 |
|
1 SPU 125Gl/4-IGTV |
620 |
70 |
220 |
9 |
|
; SPU 125 G1/4-IG AE |
620 |
60 |
9 | |
|
SPU 160G1/2-IG |
980 |
123 |
350 |
,;( 12 |
|
jsPU 160Gl/2-IGTV |
980 |
123 |
350 |
9 |
8.5. Chwytaki elektromagnetyczne i magnetyczne
Chwytanie magnetyczne przedmiotu jest stosowane do przedmiotów ferromagnetycznych. Są następujące wersje tego sposobu chwytania:
- chwytanie elektromagnetyczne proste — przedmiot jest przytrzymywany w czasie przepływu prądu przez uzwojenie elektromagnesu i uwalniany po zaniku prądu,
- chwytanie elektromagnetyczne z magnesem trwałym - przedmiot jest przytrzymywany w przypadku braku prądu, a przytrzymywanie to jest I dodatkowo wspomagane elektromagnesem; w celu uwolnienia przedmiotu zmienia się kierunek przepływu prądu elektromagnesu.
- chwytanie z magnesem trwałym i uwalnianiem pneumatycznym,
- chwytanie elektromagnetyczne ze zwalnianiem pneumatycznym.
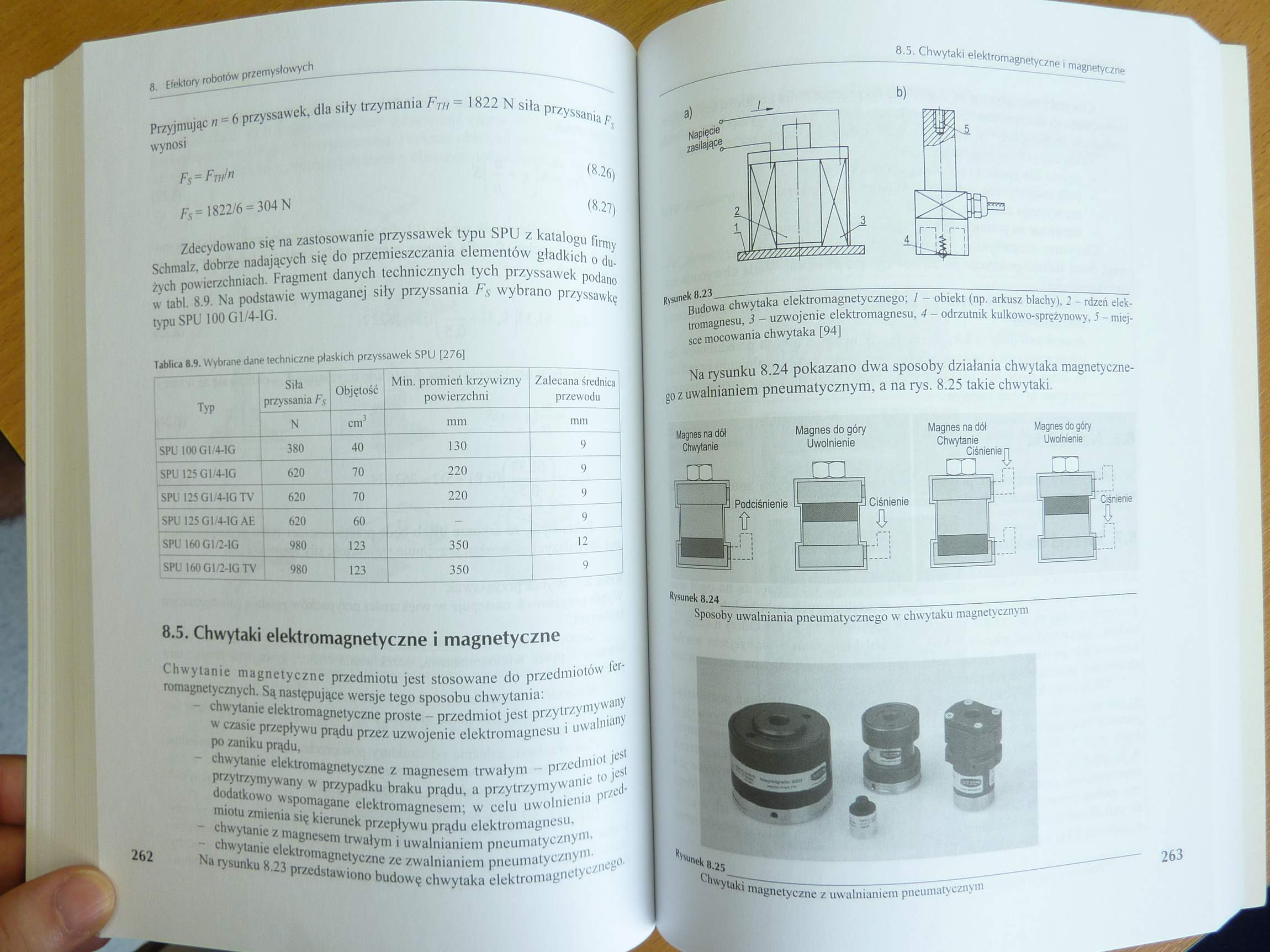
Na rysunku 8.23 przedstawiono budowę chwytaka elektromagnetycznego.
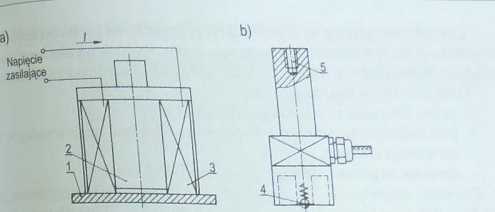
Rysunek ____
Budowa chwytaka elektromagnetycznego; / - obiekt (np. arkusz blachy), 2 - rdzeń elektromagnesu, 3 — uzwojenie elektromagnesu, 4 - odrzutnik kulkowo-sprężynowy, 5 - miejsce mocowania chwytaka [94]
Na rysunku 8.24 pokazano dwa sposoby działania chwytaka magnetycznego ż uwalnianiem pneumatycznym, a na rys. 8.25 takie chwytała.
Magnes na dół Chwytanie
Magnes do góry Uwolnienie
Magnes na dół Chwytanie
Magnes do góry Uwolnienie
JH
Ciśnienie n
m tk
m
|
lf _ M\M |
-■ ! 1 | ||
|
srn |
Ciśnienie n IMiMl ■ r |
V |
n |
|
■fc-1 |
1 |
Ciśnienie
fi
Rysunek^__
Sposoby uwalniania pneumatycznego w chwytaku magnetycznym

Chwytaki magnetyczne z uwalnianiem pneumatycznym
Wyszukiwarka
Podobne podstrony:
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
85852 P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w mecha
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budowę, gł
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
87083 P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budo
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080307 0. Efełdory robotów przemysłowych Krok 1. Ustalenie siły trzymającej W cełu ustalenia sił
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
13248 P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80
P1080297 8. Efektory robotów przemysłowych Podziału tego dokonano ze względu na występowanie w układ
P1080299 8. Efektory robotów przemysłowych 01O5±O,2 Rysunek 8.6_ Chwytak do tarcz robola AM 80 Rysun
P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia perforo
P1080310 8. Efektoły robotów przentysłowych 8. Efektoły robotów przentysłowych 266 tan* L2t Rozwiąza
więcej podobnych podstron