P1080307
0. Efełdory robotów przemysłowych
Krok 1. Ustalenie siły trzymającej
W cełu ustalenia sił trzymających należy uwzględnić ciężar elementu oraz siły bezwładności wynikające z przyspieszenia. Podczas obliczeń przyjmuje się jedno z trzech najczęściej występujących stanów obciążeń pokazanych na rys. 8.22.
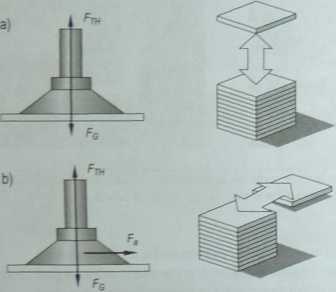
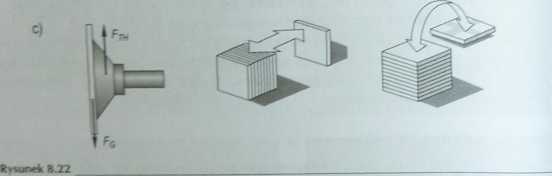
Najczęściej występujące stany obciążeń podczas chwytania arkuszy blach: a) przyssawki poziomo, siła działająca pionowo, b) przyssanie poziomo, siła poziomo, c) przyssanie pionowo, siła pionowo [276)
Przyjmując stan obciążenia jak na rys. 8.22a, teoretyczną siłę trzymająca Fth oblicza się ze wzoru
Fth = m(g + a)S (8.20)
gdzie: m - masa [kg], g - przyspieszenie ziemskie (9,81 m/s2), a - przyspieszenie [m/*2], S - współczynnik bezpieczeństwa (wartość min. 1,5, dla elementów porowatych i niejednolitych 2,0 lub więcej).
Stąd dla danych z przykładu
260
Fw= 61,33 (9,81 + 5) U = 1363 N <8-21)
Dla stanu obciążenia z rys 8.2 lb teoretyczną siłę trzymającą Fm oblicza ^ i wzoru
ĄH=mfg+—J5 (8.22)
gizie//-współczynnik tarcia: 0,1 dla powierzchni zaolejonej, 0,2+0,3 dla modrych powierzchni, 0,5 dla drewna, metalu, szkła, kamienia, 0,6 dla powierzchni porowatych
=1822N
(803)
Dla stanu obciążenia z rys. 8.21c siłę trzymającąFm oblicza się ze wzoru
Fm=-(g + *)S (8.24)
1
Fth i

1(9,81 + 5)2=3633 N
(8:
Zakładając, że arkusze blach będą przemieszczane tylko w pozycji poziomej, do dalszych rozważań przyjmuje się wartość siły Fm— 1822 N.
Krok 2. Wybór przyssawek
Wybór przyssawek następuje w większości przypadków zgodnie z następującym byterium:
Zastosowanie: podczas wyboru przyssawek istotne są warunki ich zastosowania - praca wielozmianowa, oczekiwania klienta, agresywna temperatura pracy itp.
Materiał: przyssawki są wykonywane z różnych materiałów, aby sprostać wymaganiom stawianym przez gładkie, porowate i zaolejone powierzchnie lub delikatne elementy.
Powierzchnia: zależnie od struktury powierzchni zaleca się odpowiednie kształty przyssawek. Do wyboru są przyssawki płaskie lub mieszkowe, z róż-"ymi wargami lub krawędziami uszczelniającymi oraz o różnych kształtach 1 konstrukcji.
Dla rozpatrywanego przykładu przyssawki muszą być dobrane do przenoszenia blach stalowych o wymiarach 2500+1500 mm. Dla takich formatów ach stosuje się na ogół 6 lub 8 przyssawek. Istotnym kryterium dla liczby Przyssawek jest w tym przypadku wyginanie się arkusza podczas transportu.
261
Wyszukiwarka
Podobne podstrony:
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
85852 P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w mecha
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia perforo
P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budowę, gł
53534 P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia p
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
87083 P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budo
53534 P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia p
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080358 (2) 12. Badanie dokładności robotów przemysłowych Kształt i rozmiar testowanych ścieżek nal
P1080359 (2) 12. Badanie dokładności robotów przemysłowych geometrycznych jest wyznaczana odległość
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
więcej podobnych podstron