53534 P1080309
8. Efeklory robotów przemysłowych
Chwytaki magnetyczne są stosowane do przenoszenia perforowanych blach powycinanych laserem elementów i arkuszy z otworami i wycięciami, a iaj^ elementów ferromagnetycznych, niemożliwych do uchwycenia przyssawkami. Zalety chwytaków magnetycznych:
- pewne chwytanie za pomocą pola magnetycznego,
- pole magnetyczne jest generowane za pomocą magnesu trwałego, więc nie wymaga zasilania,
- sterowane za pomocą impulsów nad- lub podciśnienia.
Chwytanie magnetyczne, podobnie jak chwytanie przez przyssanie, wv. maga dużej stałości położenia początkowego przedmiotu. Wadą chwytania magnetycznego jest:
- stosunkowo duży ciężar chwytaka, zmniejszający udźwig skuteczny manipulatora,
- stosunkowo duża indukcyjność resztkowa niektórych przedmiotów ferromagnetycznych będąca źródłem trudności przy uwalnianiu przedmiotu, która może być usunięta podczas uwalniania przez rozmagnesowanie prądem przemiennym.
8.6. Narzędzia
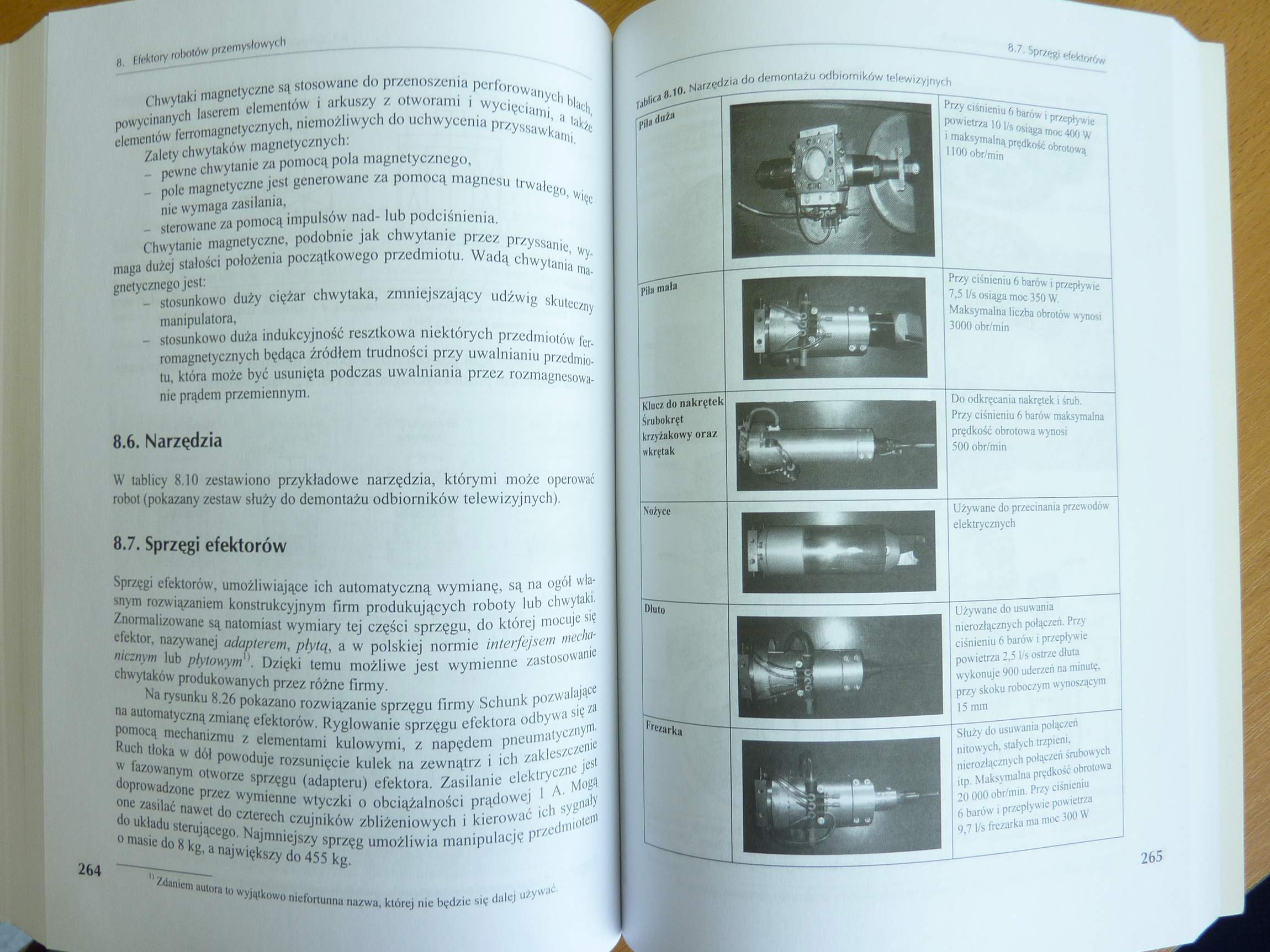
W tablicy 8.10 zestawiono przykładowe narzędzia, którymi może operować robot (pokazany zestaw służy do demontażu odbiorników telewizyjnych).
8.7. Sprzęgi efektorów
Sprzęgi efektorów, umożliwiające ich automatyczną wymianę, są na ogół własnym rozwiązaniem konstrukcyjnym firm produkujących roboty lub chwytaki. Znormalizowane są natomiast wymiary tej części sprzęgu, do której mocuje się efektor, nazywanej adapterem, płytą, a w polskiej normie interfejsem mechanicznym lub płytowym". Dzięki temu możliwe jest wymienne zastosowanie chwytaków produkowanych przez różne firmy.
Na rysunku 8.26 pokazano rozwiązanie sprzęgu firmy Schunk pozwalające na automatyczną zmianę efektorów. Ryglowanie sprzęgu efektora odbywa się za pomocą mechanizmu z elementami kulowymi, z napędem pneumatycznym. Ruch tłoka w dół powoduje rozsunięcie kulek na zewnątrz i ich zakleszczenie: w fazowanym otworze sprzęgu (adapteru) efektora. Zasilanie elektryczne jest doprowadzone przez wymienne wtyczki o obciążalności prądowej 1 A. Mogą one zasilać nawet do czterech czujników zbliżeniowych i kierować ich sygnały do układu sterującego. Najmniejszy sprzęg umożliwia manipulację przedmiotem o masie do 8 kg, a największy do 4SS kg.
264
Zdaniem autora to wyjątkowo niefortunna nazwa, której nie będzie się dalej używać.
narzędzia do demontażu odbiorników telewizyjnych
Powietrza io |/l0_- •"“Pro lOOobr/min OSCobrotową

Klucz do nakrętek Śrubokręt krzyżakowy oraz wkrętak

Do odkręcania nakrętek i śrub.
Przy ciśnieniu 6 barów maksymalna prędkość obrotowa wynosi 500 obr/min

Używane do usuwania nierozłącznych połączeń. Przy ciśnieniu 6 barów i przepływie
powietrza 2^ 1/s ostrze dłuta
wykonuje 900 uderzeń na minutę, przy skoku roboczym wynoszącym 15 mm
Służy do usuwaóiapołączeń nitowych, stałych trzpieni.
265
Wyszukiwarka
Podobne podstrony:
53534 P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia p
P1080309 8. Efeklory robotów przemysłowych Chwytaki magnetyczne są stosowane do przenoszenia perforo
P1080243 Il Sterowanie robotów przemysłowych modułowej budowie są wygodne do aplikacji, diagnozowani
P1080288 7. Napędy robotów przemysłowych Przekładnie linowe są stosowane w robotach jako układy w za
41895 P1080251 5. Sterowanie robotów przemysłowych W metodzie fotooptycznej są stosowane fotokomórki
HPIM0892 w HHHHH 10. Zastotowanu robotów przemysłowych■■ w dowolnym położeniu. Roboty stosowane do
45482 P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w
P1080304 8. Efektory robotów przemysłowych F Ws Rysunek 8.14 Wyznaczenie sił i przemieszczeń w mecha
P1080305 8. Efektory robotów przemysłowych Rysunek 8.16^_ Wpływ długości na przebieg charakterystyki
P1080308 8. Efektory robotów przemysłowych Przyjmując n = 6 przyssawek, dla siły trzymania FTH = 182
P1080311 8. Efektory robotów przemysłowych W normie PN-EN ISO 9409-1:2004 [172] określono budowę, gł
więcej podobnych podstron