P1080288
7. Napędy robotów przemysłowych
Przekładnie linowe są stosowane w robotach jako układy w zadaniach przekazywania napędu na dalsze odległości. Przykładem mogą być napędy efek-torów (narzędzi) wykonujących złożone ruchy w ograniczonej przestrzeni, gdy nie ma miejsca na usytuowanie tam silników.
Przekładnie łańcuchowe charakteryzują się pracą bez poślizgu oraz zachowaniem stałości przełożenia. W robotach przemysłowych są one stosowane jako mechanizmy przekazywania ruchu o małej prędkości na dalsze odległości lub w robotach mobilnych do zamiany ruchu obrotowego na liniowy.
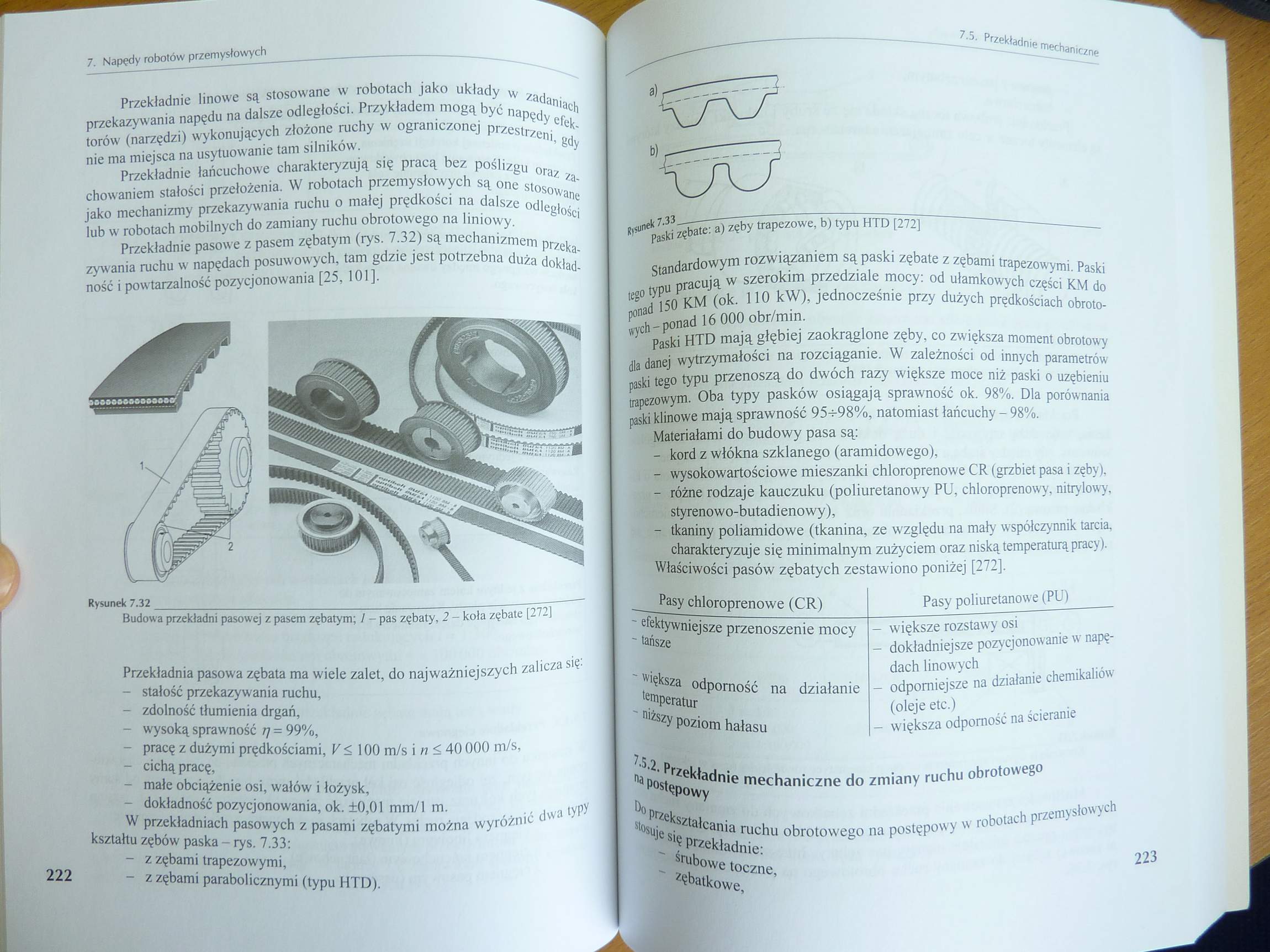
Przekładnie pasowe z pasem zębatym (rys. 7.32) są mechanizmem przekazywania ruchu w napędach posuwowych, tam gdzie jest potrzebna duża dokładność i powtarzalność pozycjonowania [25, 101].
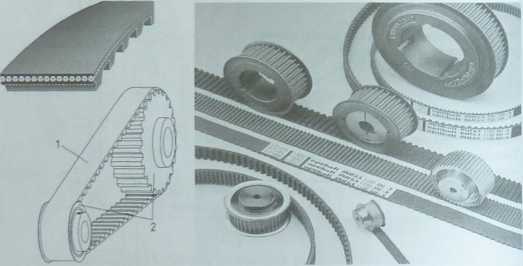
Rysunek 7.32^__
Budowa przekładni pasowej z pasem zębatym; 1 - pas zębaty, 2 - koła zębate [272]
Przekładnia pasowa zębata ma wiele zalet, do najważniejszych zalicza si?:
- stałość przekazywania ruchu,
- zdolność tłumienia drgań,
- wysoką sprawność tj = 99%,
- pracę z dużymi prędkościami, V< 100 m/s i n < 40 000 m/s,
- cichą pracę,
- małe obciążenie osi, wałów i łożysk,
- dokładność pozycjonowania, ok. ±0,01 mm/1 m.
W przekładniach pasowych z pasami zębatymi można wyróżnić dwa tyF kształtu zębów paska - rys. 7.33:
- z zębami trapezowymi,
- z zębami parabolicznymi (typu HTD).
SBUBmechaniczne

Standardowym rozwiązaniem są paski zębate z zębami trapezowymi. Paski tego typu pracują w szerokim przedziale mocy: od ułamkowych części KM do ponad 150 KM (ok. 110 kW), jednocześnie przy dużych prędkościach obrotowych-ponad 16 000 obr/min.
Paski HTD mają głębiej zaokrąglone zęby, co zwiększa moment obrotowy dla danfe}^wytrzymałości na rozciąganie. W zależności od innych parametrów paski tego typu przenoszą do dwóch razy większe moce niż paski o uzębieniu trapezowym. Oba typy pasków osiągają sprawność ok. 98%. Dla porównania paski klinowe mają sprawność 95-5-98%, natomiast łańcuchy - 98%.
Materiałami do budowy pasa są:
S kord z włókna szklanego (aramidowego),
- wysokowartościowe mieszanki chloroprenowe CR (grzbiet pasa i zęby),
- różne rodzaje kauczuku (poliuretanowy PU, chloroprenowy, nitrylowy,
!wstyrenowo-bu.tadienowy),
- tlaniny poliamidowe (tkanina, ze względu na mały współczynnik tarcia,
,, Charakteryzuj e się minimalnym zużyciem oraz niską temperaturą pracy).
Właściwości pasów zębatych zestawiono poniżej [272].
|
Pasjfćjptfoprenowe (CR) |
Pasy poliuretanowe (PU) |
|
- efektywniejsze przenoszenie mocy |
— większe rozstawy osi |
|
- tańsze |
- dokładniejsze pozycjonowanie w napędach linowych |
|
~ większaiojdpomość na działanie |
- odporniejsze na działanie chemikaliów |
|
temperatur |
(oleje etc.) |
|
~ niższy poziom hałasu |
- większa odporność na ścieranie |
7.5.2. Przekładnie mechaniczne do zmiany ruchu obrotowego na postępowy
Do przekształcania ruchu obrotowego na postępowy w robotach przemysłowych sl°suje się przekładnie:
- śrubowe toczne,
- zębatkowe, ^23
Wyszukiwarka
Podobne podstrony:
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
41895 P1080251 5. Sterowanie robotów przemysłowych W metodzie fotooptycznej są stosowane fotokomórki
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
P1080292 7. Napędy robotów przemysłowych Wskaźnik materiałochłonności typowej przekładni falowej ogó
P1080278 7. Napędy robotów przemysłowych tylko z dużymi prędkościami obrotowymi. Na rysunku 7.12 są
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
więcej podobnych podstron