P1080278

7. Napędy robotów przemysłowych
tylko z dużymi prędkościami obrotowymi. Na rysunku 7.12 są przedstawione zasada działania takiego silnika i kształt uzwojeń wirnika.
Taka konstrukcja silnika wynika ze względu na potrzebę uzyskania wielu przewodów poruszających się w polu magnetycznym (gdyby to była pełna tarcza, to byłaby ona traktowana jako jeden przewód). Liczba przewodów decyduje o momencie rozwijanym przez silnik. Tarcza (wirnik) jest wykonana z materiału izolacyjnego i po obu jej stronach są naniesione przewody. Łączą się one na zewnętrznej powierzchni walcowej tarczy. Wewnętrzne końce przewodów spełniają funkcję wycinków komutatora, współpracując ze szczotkami umieszczonymi na wałku. Wzbudzenie następuje od magnesów trwałych rozmiesza czonych równolegle do osi wirników. Silniki te ze względu na mały moment bezwładności wirnika mają bardzo małą stałą czasową, czyli bardzo dobre własności dynamiczne.
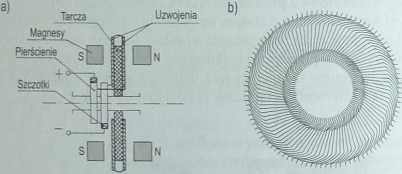
Rysunek 7.12 ___________________
Silnik szybkoobrotowy z płaskim wirnikiem ze wzbudzeniem stałym: a) idea działania, b) kształt uzwojeń [84]
Do wad napędów elektrycznych z silnikami komutatorowymi należy zaliczyć:
- ograniczoną trwałość szczotek w komutatorach silnika prądu stałego,
- ograniczone wykorzystanie w środowiskach zagrożonych wybuchem,
- występowanie dodatkowych przekładni między silnikiem elektrycznym i elementem wykonawczym robota.
Układy napędowe robotów z silnikami prądu stałego są zawsze układami regulacji automatycznej, a patrząc od strony funkcjonalnej, pracują jako układy regulacji położenia, zwane serwomechanizmami lub serwonapędami.
Konieczność stosowania układów regulacyjnych do zasilania silników prądu stałego wynika z dwóch podstawowych powodów:
- w ogólnodostępnej sieci elektrycznej płynie prąd przemienny (50 Hz, 3 x 380 V) o nieregulowanym napięciu,
- napędy z silnikami prądu stałego pracują jako bezstopniowe (regulowane) i wobec tego silnik musi być zasilany ze źródła prądu stałego
202 o regulowanych parametrach.
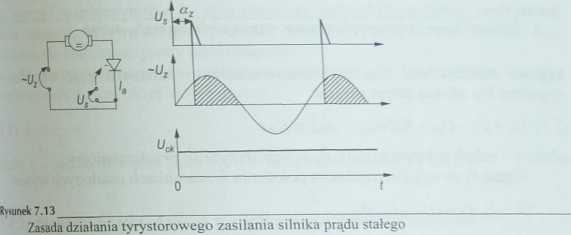
Najczęściej w robotach są stosowane tranzystorowe lub tyrystorowe układy napędowe. Tyrystor, będący czterowarstwowym trójelektrodo-wym sterowanym prostownikiem, nazywanym również diodą sterowaną, umożliwia regulowanie wartości napięcia wyprostowanego. Zasadę działania tyrystorowego zasilania silnika prądu stałego pokazano na rys. 7.13, a regulacja polega na sterowaniu początkiem przewodzenia, czyli kątem zapłonu a2. W napędach stosuje się układy tyrystorowe jedno-, dwu-, trzy- oraz sześciopulsowe, które dają możliwość zmiany kierunku obrotów i w których minimalizuje się pulsacje napięcia zasilającego.
Serwomechanizm z komutatorowym silnikiem prądu stałego składa się z:
- silnika prądu stałego obcowzbudnego lub z magnesami trwałymi.
- regulatora i.wzmacniacza elektronicznego,
- zasilacza tyrystorowego,
- bezluzowej przekładni redukującej prędkość obrotową silnika i ewentualnie przekładni zamieniającej ruch obrotowy na postępowy.
- układów pomiarowych położenia i prędkości.
Ideę tyrystorowego napędu jako układu automatycznej regulacji prędkości i położenia można przedstawić na podstawie schematu blokowego (rys. 7.14), w którym wyodrębniono najważniejsze bloki funkcjonalne [70].
W przedstawionym schemacie blokowym można wyróżnić dwa niezależne obwody automatycznej regulacji:
- obwód sprzężenia zwrotnego położeniowego,
- obwód automatycznej regulacji prędkości obrotowej z prądnicą tachometryczną jako sprzężeniem zwrotnym prędkości.
W celu zapewniania działania serwomechanizmu konieczne jest występo-wanie uchybu położenia £<? — napięcia U& Układ dąży do zminimalizowania war-tości sygnału napięciowego U* czyli uchybu e, do zera, w ten sposób powodując Zdążanie rzeczywistego przemieszczenia ę?ist wału silnika i odpowiadającego mu
203
Wyszukiwarka
Podobne podstrony:
P1080283 7. Napędy robotów przemysłowych SN liniowych nie różni się istotnie od obrotowych. Można tu
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron