P1080283

7. Napędy robotów przemysłowych
SN
liniowych nie różni się istotnie od obrotowych. Można tu więc wymienić prądu stałego, prądu przemiennego z silnikami asynchronicznymi i syncnHH nymi oraz silniki skokowe (krokowe) — rys. 7.22.
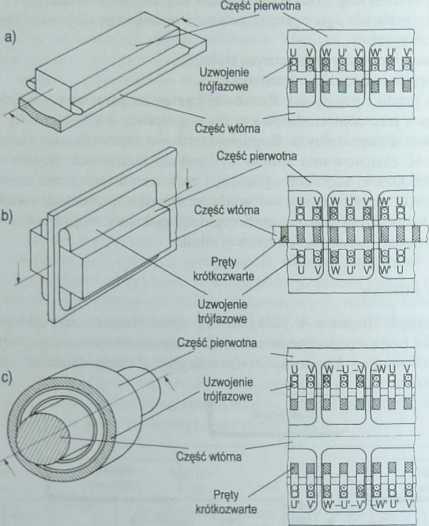
Schematy budowy silników liniowych przedstawiono na rys. 7.23.
Rysunek '
Budowa silnika liniowego asynchronicznego: a) z pojedynczą częścią pierwotną b) z po* dwójną częścią pierwotną, c) solenoidalnego
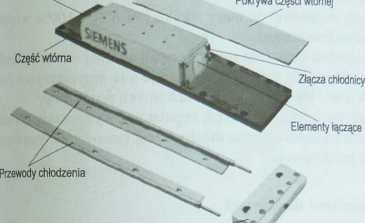
Dwa główne zespoły silnika liniowego są często określane jako część pierwotna i część wtórna. Przez analogię do silników o ruchu obrotowym część pierwotną często nazywa się statorem (odpowiada stojanowi klasycznego silnika trójfazowego). Jako część wtórną określa się ten element silnika liniowego, w którym znajdują się magnesy trwałe, lub - w silnikach asynchronicznych -część reakcyjna, która odpowiada wirnikowi klasycznego silnika trójfazowego. Składowe zespoły silnika liniowego pokazano na rys. 7.24.
Osłona termiczna

Cześć pierwotna
Rozdzielacz
Rysunek 3^___
Składowe zespoły silnika liniowego [28l| >■>'
Występują silniki liniowe zarówno z pojedynczą częścią pierwotną (rys. 7.23a), jak j podwójną (rys. 7.23b) i solenoidalną (rys. 7.23c). W silnikach jednoczęściowych powstaje duża siła przyciągająca do siebie obie części, która w silnikach dwuczęściowych i solenoidalnych kompensuje się [100].
Część pierwotna silnika zawiera trójfazowe uzwojenie (U, V, W) zasilane przemiennym; prądem trójfazowym. Wytwarzane jest ruchome pole magnetyczne. PrędkoŚć przemieszczania się wektora strumienia magnetycznego jest wprost proporcjonalna do częstotliwości prądu zasilającego.
Część wtórna silnika może być wykonana jako:
- listwa w postaci grzebienia z prętów (analogia do wirnika klatkowego)
- dla silnika asynchronicznego,
- liniał zj^magnesami trwałymi rozmieszczonymi wzdłuż całej długości prowadnicy (analogia do wirnika z magnesami trwałymi) - dla silnika
Ij&tęhronicznego.
Napędy liniowe z trójfazowym silnikiem asynchronicznym prądu przemiennego mają następujące cechy charakterystyczne:
- siła napędowa znacząco zależy od obciążenia, co w przypadku zmiennego obciążenia prowadzi do pulsacji,
- silne nagrzewanie się statora wskutek indukowania SEM,
** ^każdorazowo po włączeniu silnika należy sprawdzić położenie punktu
»t»&Jpczątkowego w układzie współrzędnych absolutnych, 213
Wyszukiwarka
Podobne podstrony:
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron