73038 P1080282
7. Napędy robotów przemysłowych
o stałej amplitudzie i zwykle stałym okresie oraz modulowanej szerokości (modulowanym czasie trwania impulsów). Częstotliwość impulsów jest nazywana częstotliwością nośną lub częstotliwością przełączeń (ang. carier freąuency, switching freąuency). Częstotliwość modulująca szerokość impulsów jest zarazem częstotliwością generowanego prądu.
Zastosowanie mikroprocesorów w napędach prądu przemiennego (napędy cyfrowe) powoduje zastąpienie sprzętowej realizacji układów sterowania i regulacji przez odpowiednie oprogramowanie. Stwarza to dodatkowe możliwości w odniesieniu do rozwiązań z regulatorami analogowymi:
- struktura i budowa są niezależne od zadań realizowanych przez układ i mogą być wykonane wg jednolitej koncepcji,
- funkcję układu określa program, który w znacznym stopniu nie zależy od sposobu realizacji sprzętowej i może być przygotowany w trakcie projektowania urządzenia,
- korekta właściwości regulacyjnych w czasie rozruchu i eksploatacji urządzenia nie wymaga ingerencji w obiekt fizyczny (zmiany w regulatorach); zmiany algorytmu sterowania dokonuje się za pomocą odpowiedniego programu,
- możliwe jest cyfrowe sprzęgnięcie układu sterowania numerycznego z napędem i dzięki temu znaczne podwyższenie jakości regulacji.
Napędy ze sterowaniem mikroprocesorowym tworzą tzw. serwonapędy cyfrowe, nazywane także inteligentnymi [282]. Koncepcja ta wymaga stosowania cyfrowych interfejsów między sterowaniem numerycznym CNC a Sterownikiem napędu. Takie rozwiązanie umożliwia aktywne sterowanie nie tylko wartością zadaną przemieszczenia, ale również prędkością i momentem napędowym. Dzięki temu możliwe jest osiąganie znacznie korzystniejszych właściwości dynamicznych niż w dotychczasowych serwonapędach.
210
Regulator Regulator
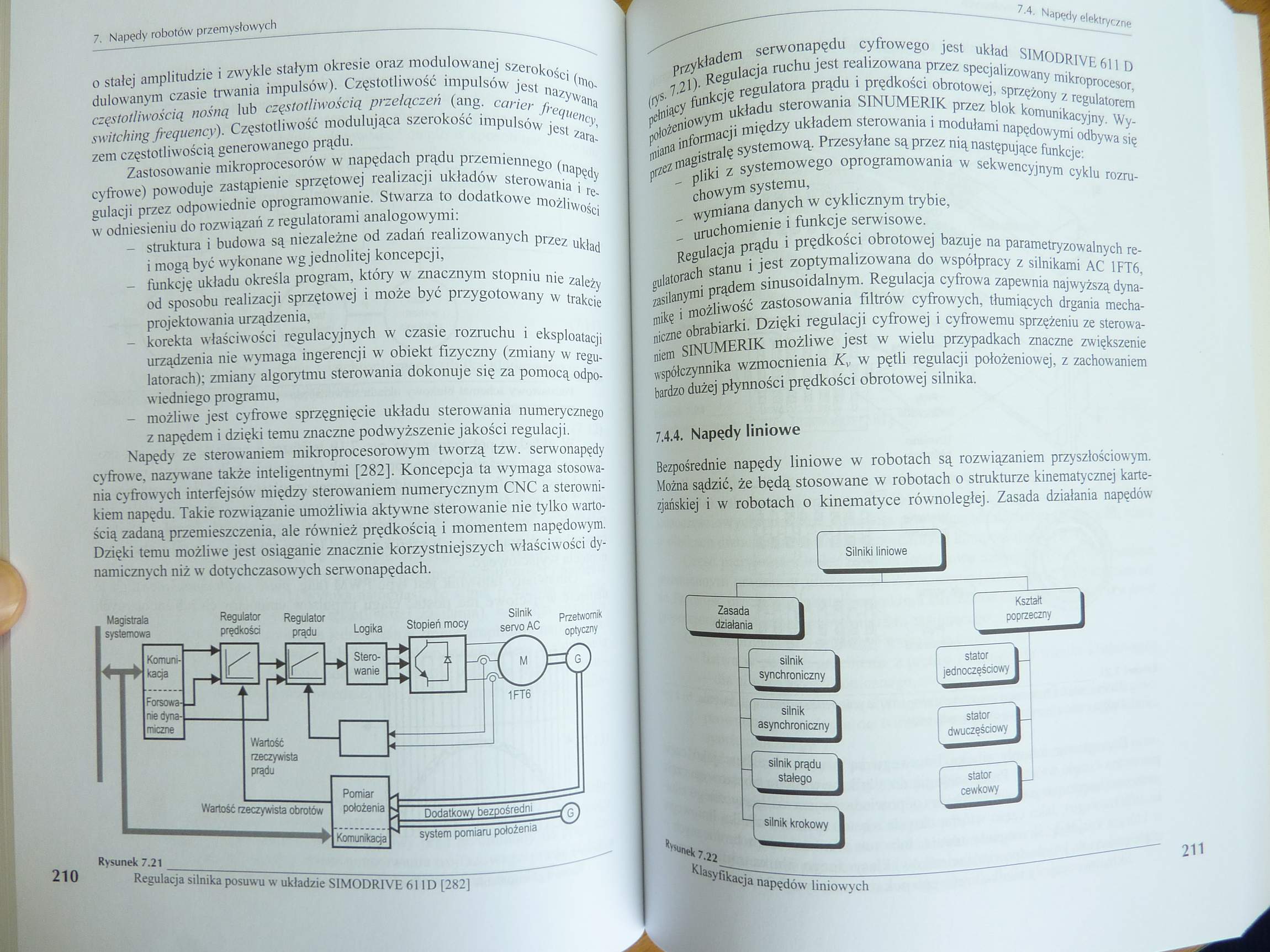
Rysunek 7;21 1 " . .. __
Regulacja silnika posuwu w układzie SIMODRIYE 61 ID [282]
przykładem serwonapędu cyfrowego jest układ SIMODRIVE 611 D g||7.21). Regulacja ruchu jest realizowana przez specjalizowany mikroprocesor, pełniący funkcję regulatora prądu i prędkości obrotowej, sprzężony z regulatorem położeniowym układu sterowania SINUMERIK przez blok komunikacyjny. Wymiana informacji między układem sterowania i modułami napędowymi odbywa się przez magistralę systemową. Przesyłane są przez nią następujące funkcje:
- pliki z systemowego oprogramowania w sekwencyjnym cyklu rozruchowym Systemu,
- wymiana danych w cyklicznym trybie,
- uruchomienie i funkcje serwisowe.
Regulacja prądu i prędkości obrotowej bazuje na parametryzowalnych regulatorach stanu i jest; zoptymalizowana do współpracy z silnikami AC 1FT6, zasilanymi prądem sinusoidalnym. Regulacja cyfrowa zapewnia najwyższą dynamikę i możliwość zastosowania filtrów cyfrowych, tłumiących drgania mechaniczne obrabiarki. Dzięki regulacji cyfrowej i cyfrowemu sprzężeniu ze sterowaniem SINUMERIK możliwe jest w wielu przypadkach znaczne zwiększenie współczynnika wzmocnienia Kv w pętli regulacji położeniowej, z zachowaniem bardzo dużej płynności prędkości obrotowej silnika.
7.4.4. Napędy liniowe
Bezpośrednie napędy liniowe w robotach są rozwiązaniem przyszłościowym. Można sądzić, że będą stosowane w robotach o strukturze kinematycznej karte-zjańskiej i w robotach o kinematyce równoległej. Zasada działania napędów
Silniki liniowe
|
Zasada |
Kształt | |
|
działania |
L |
poprzeczny |
|
silnik 1 |
stator |
|
^synchroniczny | |
jednoczęściowy I- |
|
silnik | | |
|
asynchroniczny 1 |
stator |
|
dwuczęściowy j | |
|
silnik prądu | | |
|
stałego |
stator | |
|
cewkowy J | |
|
silnik krokowy 1 | |
^ek 7.22_
Klasyfikacja napędów liniowych
Wyszukiwarka
Podobne podstrony:
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
więcej podobnych podstron