P1080292
7. Napędy robotów przemysłowych
Wskaźnik materiałochłonności typowej przekładni falowej ogólnego przeznaczenia wynosi 0,03 -t- 0,035 kg/(N -m), gdy ten sam wskaźnik dla klasycznej przekładni z zębatymi kołami walcowymi wynosi 0,15-5-20 kg/(N • m), a dla nowoczesnych rozwiązań z hartowanymi zębami kół wynosi powyżej 0,07 kg/(N • m). Cechy te umożliwiają wykorzystanie jej nie tylko w mechanizmach robotów przemysłowych, ale również w układach automatyki, mechanizmach sterujących rakiet i pojazdów kosmicznych (jedno z pierwszych zastosowań: amerykański pojazd księżycowy - Lunar Rover) i wszędzie tam, gdzie jest wymagana mała masa, duże przełożenie i precyzja regulacji.
Produkowane seryjnie przekładnie falowe mają porównywalne z klasycznymi przekładniami: niezawodność, trwałość i sprawność, przy znacznie mniejszej masie i objętości. Luz obwodowy przekładni mierzony na wale napędzanym jest sumą luzu międzyzębnego obu ogniw, luzu spowodowanego tolerancją wykonania łożyska kulkowego generatora, luzu między zewnętrzną bieżnią łożyska kulkowego i wewnętrzną średnicą ogniwa elastycznego oraz luzu pochodzącego od kąta skręcenia tulei ogniwa elastycznego przenoszonym momentem obrotowym. Kąt ten jest proporcjonalny do współczynnika sztywności skrętnej ogniwa elastycznego. W przekładniach produkowanych seryjnie można uzyskać luz o wartości do 3 min kątowych.
7.5.3.3. Przekładnie cykłoidalne
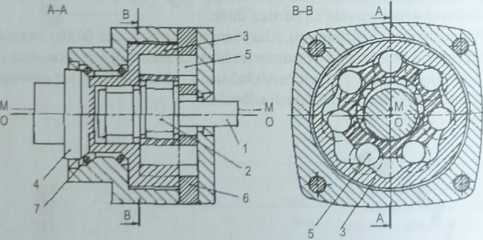
Przekładnie cykłoidalne należą do grupy przekładni mimośrodowych o zazębieniu cykloidalnym. Na rysunku 7.41 pokazano promowaną obecnie wersję przekładni cykloidalnej.
Rysunek 7,41i.^.- ' = . ' _ _ — _
Przekładnia cyldoidalna; I - wał wejściowy (wysokoobrotowy), 2 — mimośród na walc 3 - koło centralne z zębami wewnętrznymi trochoidalnymi, 4 - wał wyjściowy (zda'vC/^ 5 - sworznie koła palcowego, 6 - płyta z otworami na sworznie, 5, 7 - łożyska koła cen nego 3 [73]
Zasada działania tej przekładni jest następująca. Koło centralne 3 z zębami ^gwnętrznymi o profilu trochoidalnym jest ułożyskowane i, obracając się, prze-tazuje napęd na wał zdawczy 4. Koło tarczowe z zębami palcowymi, utworzonymi ze sworzni 5, nie obraca się, lecz wykonuje tylko ruchy wahadłowe; ruch obrotowy uniemożliwia mu swobodne obsadzenie prawych końców sworzni 5 w okrągłych otworach płyty 6. Sworznie 5 spełniają tu więc podwójną rolę, są jednocześnie zębami koła tarczowego i sworzniami odbioru momentu.
W odróżnieniu od falowych przekładnie trochoidalne są mniejsze, tzn. mają większą wartość stosunku przenoszonego momentu do średnicy zewnętrznej. Wartość przełożenia jednego stopnia przekładni wynosi obecnie 1:6 >/ > 1:115. W przekładniach trochoidalnych teoretycznie i praktycznie połowa liczby sworzni znajduje się w zazębieniu.
7J3.4. Przekładnie precesyjne
Przekładnie precesyjne są to przekładnie korbowo-stożkowe o złożonym mchu przestóenno-sferycznym satelity. Przekładnia taka (rys. 7.42) składa się z koła satelitarnego (1) i koła centralnego (2), które są zazębione wewnętrznie. Tworzące zębów tych kół przecinają się w punkcie zwanym środkiem precesji, stąd nazwa precesyjne. Koło satelitarne (/) jest zamocowane obrotowo na jarzmie (4) w postaci pochylonej korby. Osie obu kół tworzą między sobą kąt 6. Obrót jarzma (4) wprawia satelitę w kulisty ruch względem środka precesji [9].
b)
3)
c)
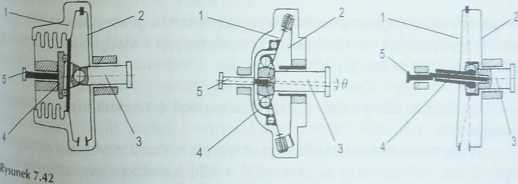
J^ne typy przekładni precesyjnych: a) z satelitą połączoną z obudową za pomocą miesz-b) z kołem stożkowym z rolkami, c) o prostoliniowo-łukowym zazębieniu; 1 - satelita, "koło centralne, 3 - wał wyjściowy, 4 - jarzmo, 5 - wał wejściowy [9]
Wyszukiwarka
Podobne podstrony:
81406 P1080290 7. Napędy robotów przemysłowych 7.5.3.I. Przekładnie planetarne Przekładnia planetarn
P1080288 7. Napędy robotów przemysłowych Przekładnie linowe są stosowane w robotach jako układy w za
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
22097 P1080289 7. Napędy robotów przemysłowych — pasowe z pasem zębatym, —
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
45696 P1080272 7. Napędy robotów przemysłowych go są obecnie powszechnie stosowane w robotyce. Jedna
73038 P1080282 7. Napędy robotów przemysłowych o stałej amplitudzie i zwykle stałym okresie oraz mod
więcej podobnych podstron