HPIM0771
3. Budowa robotów przemysłowych ———---
W 01460
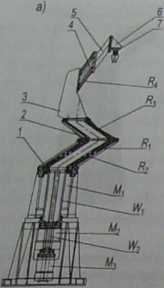
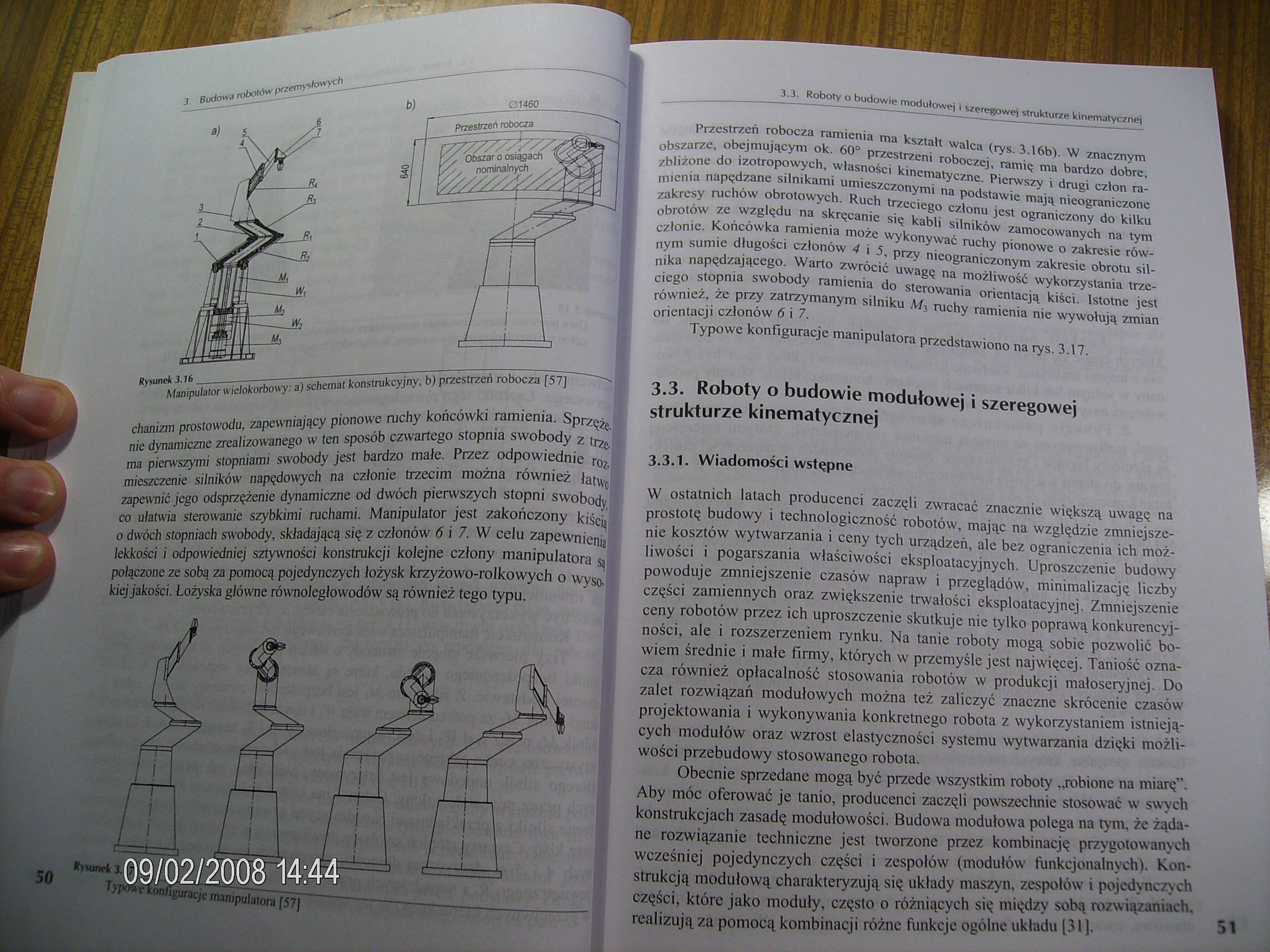
Rysunek 3.16
Manipulator wielokorbowy: a) schemat konstrukcyjny, b) przestrzeń robocza [57]
chanizm prostowodu, zapewniający pionowe ruchy końcówki ramienia. Sprzęte. nie dynamiczne zrealizowanego w fen sposób czwartego stopnia swobody z trzej ma pierwszymi stopniami swobody jest bardzo małe. Przez odpowiednie roz.l mieszczenie silników napędowych na członie trzecim można również łatwo] zapewnić jego odsprzężenie dynamiczne od dwóch pierwszych stopni swobody,] co ułatwia sterowanie szybkimi ruchami. Manipulator jest zakończony kiścią] o dwóch stopniach swobody, składającą się z członów 6 i 7. W celu zapewnienia! lekkości i odpowiedniej sztywności konstrukcji kolejne człony manipulatora su połączone ze sobą za pomocą pojedynczych łożysk krzyżowo-rolkowych o wysoj kiej jakości. Łożyska główne równoległowodów są również tego typu.
3.3. Roboty o budowie modułowej i szeregowej strukturze kinematycznej
Przestrzeń robocza ramienia ma kształt walca (rys. 3.16b). W znacznym obszarze, obejmującym ok. 60° przestrzeni roboczej, ramię ma bardzo dobre, zbliżone do izotropowych, własności kinematyczne. Pierwszy i drugi człon ramienia napędzane silnikami umieszczonymi na podstawie mają nieograniczone zakresy ruchów obrotowych. Ruch trzeciego członu jest ograniczony do kilku obrotów ze względu na skręcanie się kabli silników zamocowanych na tym członie. Końcówka ramienia może wykonywać ruchy pionowe o zakresie równym sumie długości członów 4 i 5, przy nieograniczonym zakresie obrotu silnika napędzającego. Warto zwrócić uwagę na możliwość wykorzystania trzeciego stopnia swobody ramienia do sterowania orientacją kiści. Istotne jest również, że przy zatrzymanym silniku Mj ruchy ramienia nie wywołują zmian orientacji członów 6 i 7.
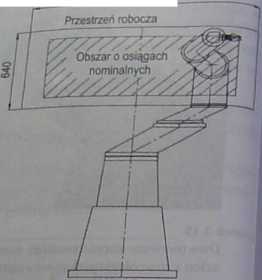
Typowe konfiguracje manipulatora przedstawiono na rys. 3.17.
3.3. Roboty o budowie modułowej i szeregowej strukturze kinematycznej
3.3.1. Wiadomości wstępne
W ostatnich latach producenci zaczęli zwracać znacznie większą uwagę na prostotę budowy i technologiczność robotów, mając na względzie zmniejszenie kosztów wytwarzania i ceny tych urządzeń, ale bez ograniczenia ich możliwości i pogarszania właściwości eksploatacyjnych. Uproszczenie budowy powoduje zmniejszenie czasów napraw i przeglądów, minimalizację liczby części zamiennych oraz zwiększenie trwałości eksploatacyjnej. Zmniejszenie ceny robotów przez ich uproszczenie skutkuje nie tylko poprawą konkurencyjności, ale i rozszerzeniem rynku. Na tanie roboty mogą sobie pozwolić bowiem średnie i małe firmy, których w przemyśle jest najwięcej. Taniość oznacza również opłacalność stosowania robotów w produkcji małoseryjnej. Do zalet rozwiązań modułowych można też zaliczyć znaczne skrócenie czasów projektowania i wykonywania konkretnego robota z wykorzystaniem istniejących modułów oraz wzrost elastyczności systemu wytwarzania dzięki możliwości przebudowy stosowanego robota.
Obecnie sprzedane mogą być przede wszystkim roboty „robione na miarę”. Aby móc oferować je tanio, producenci zaczęli powszechnie stosować w swych konstrukcjach zasadę modułowości. Budowa modułowa polega na tym, że żądane rozwiązanie techniczne jest tworzone przez kombinację przygotowanych wcześniej pojedynczych części i zespołów (modułów funkcjonalnych). Konstrukcją modułową charakteryzują się układy maszyn, zespołów i pojedynczych części, które jako moduły, często o różniących się między sobą rozwiązaniach, realizują za pomocą kombinacji różne funkcje ogólne układu (31].
Wyszukiwarka
Podobne podstrony:
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
P1080212 3. Budowa robotów przemysłowych Platforma Rysunek 3.34_ Platforma Stewarta [ 107] Platforma
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
87439 P1080216 3. Budowa robotów przemysłowych Rysunek3.42 -
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
więcej podobnych podstron