HPIM0779
I
3. Budowa robotów przemystowyt-b
Rywnrt 3.32 .. _——
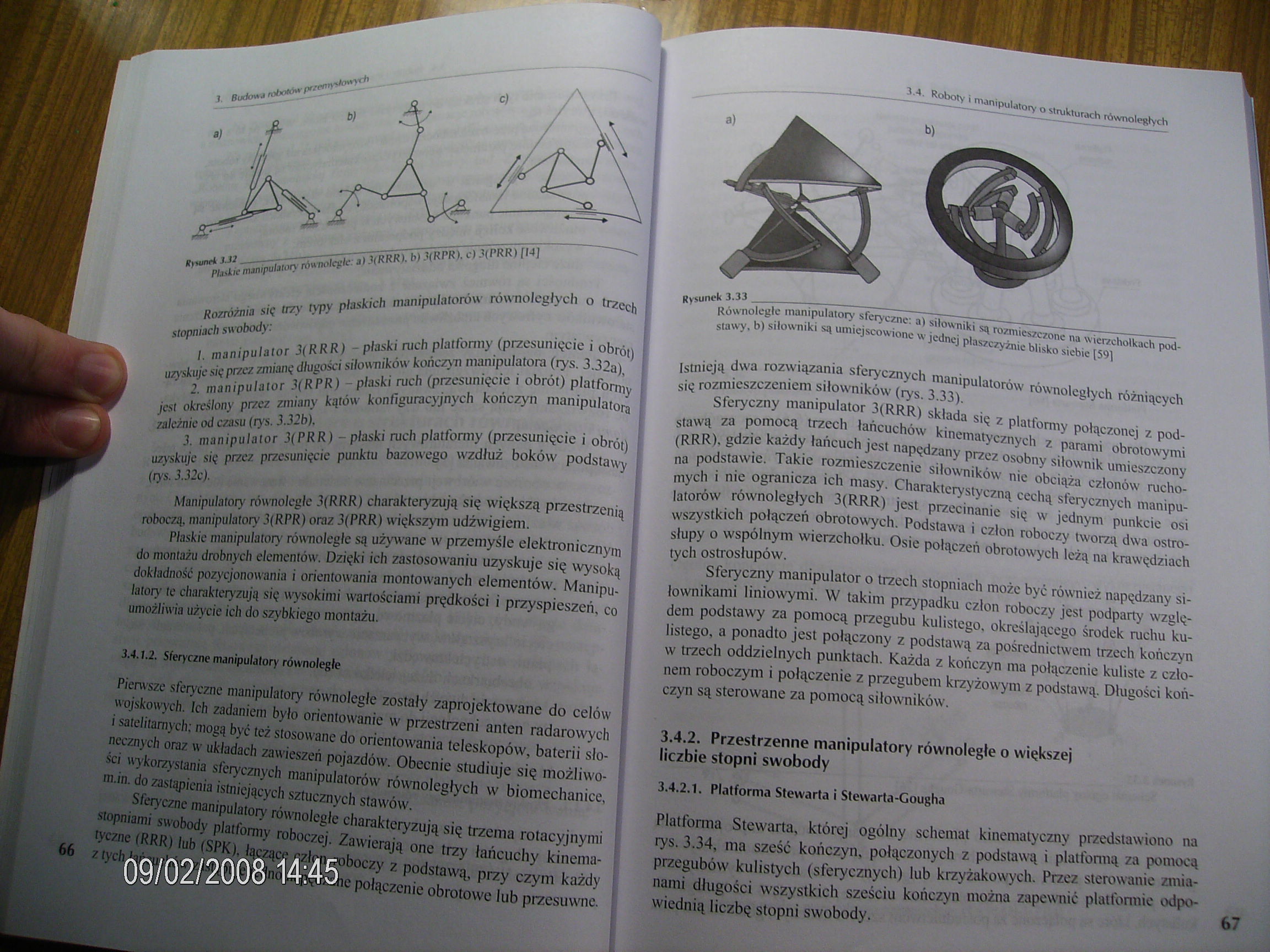
pjailic mtnipulatory równoległe: a) 3(RRR), b) 3(RPR), c) 3(PRR) [14]

Rozróżnia się trzy typy płaskich manipulatorów równoległych o trzech I stopniach swobody:
1. manipulator 3(RRR) - płaski ruch platformy (przesunięcie i obrót) I uzyskuje się przez zmianę długości siłowników kończyn manipulatora (rys. 3.32a), I
2. manipulator 3(RPR) - płaski ruch (przesunięcie i obrót) platformy I jest określony przez zmiany kątów konfiguracyjnych kończyn manipulatora zależnie od czasu (rys. 3.32b),
3. manipulator 3(PRR) - płaski ruch platformy (przesunięcie i obrót) uzyskuje się przez przesunięcie punktu bazowego wzdłuż boków podstawy (rys. 3.32c).
Manipulatory równoległe 3(RRR) charakteryzują się większą przestrzenią roboczą, manipulatory 3(RPR) oraz 3(PRR) większym udźwigiem.
Płaskie manipulatory równoległe są używane w przemyśle elektronicznym I do montażu drobnych elementów. Dzięki ich zastosowaniu uzyskuje się wysoką I dokładność pozycjonowania i orientowania montowanych elementów. Manipulatory te charakteryzują się wysokimi wartościami prędkości i przyspieszeń, co I umożliwia użycie ich do szybkiego montażu.
3.4.1.2. Sferyczne manipulatory równoległe
Pierwsze sferyczne manipulatory równoległe zostały zaprojektowane do celów wojskowych. Ich zadaniem było orientowanie w przestrzeni anten radarowych i satelitarnych; mogą być też stosowane do orientowania teleskopów, baterii słonecznych oraz w układach zawieszeń pojazdów. Obecnie studiuje się możliwości wykorzystania sferycznych manipulatorów równoległych w biomechanice, m.in. do zastąpienia istniejących sztucznych stawów.
Sferyczne manipulatory równoległe charakteryzują się trzema rotacyjnymi stopniami swobody platformy roboczej. Zawierają one trzy łańcuchy kinema-
| podstawą, przy czym każdy :zcnie obrotowe lub przesuwne.
Rysunek 3.33_ :
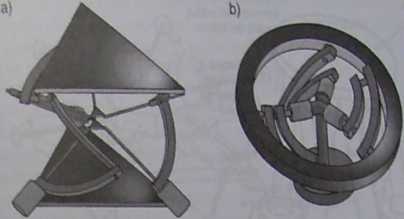
Równoległe manipulatory sferyczne: a) siłowniki są rozmieszczone na wierzchołkach podstawy, b) siłowniki są umiejscowione w jednej płaszczyźnie blisko siebie [59]
Istnieją dwa rozwiązania sferycznych manipulatorów równoległych różniących się rozmieszczeniem siłowników (rys. 3.33).
Sferyczny manipulator 3(RRR) składa się z platformy połączonej z podstawą za pomocą trzech łańcuchów kinematycznych z parami obrotowymi (RRR), gdzie każdy łańcuch jest napędzany przez osobny siłownik umieszczony na podstawie. Takie rozmieszczenie siłowników nie obciąża członów ruchomych i nie ogranicza ich masy. Charakterystyczną cechą sferycznych manipulatorów równoległych 3(RRR) jest przecinanie się w jednym punkcie osi wszystkich połączeń obrotowych. Podstawa i człon roboczy tworzą dwa ostrosłupy o wspólnym wierzchołku. Osie połączeń obrotowych leżą na krawędziach tych ostrosłupów.
Sferyczny manipulator o trzech stopniach może być również napędzany siłownikami liniowymi. W takim przypadku człon roboczy jest podparty względem podstawy za pomocą przegubu kulistego, określającego środek ruchu kulistego, a ponadto jest połączony z podstawą za pośrednictwem trzech kończyn w trzech oddzielnych punktach. Każda z kończyn ma połączenie kuliste z członem roboczym i połączenie z przegubem krzyżowym z podstawą. Długości kończyn są sterowane za pomocą siłowników.
3.4.2. Przestrzenne manipulatory równoległe o większej liczbie stopni swobody
3.4.2.1. Platforma Stewarta i Stewarta-Gougha
Platforma Stewarta, której ogólny schemat kinematyczny przedstawiono na rys. 3.34, ma sześć kończyn, połączonych z podstawą i platformą za pomocą przegubów kulistych (sferycznych) lub krzyżakowych. Przez sterowanie zmianami długości wszystkich sześciu kończyn można zapewnić platfonnie odpowiednią liczbę stopni swobody.
_
67
Wyszukiwarka
Podobne podstrony:
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0773 i. Budowa robotów priemyslowyth ■ 3.3. Roboty o budowie modułowej i szereguwej strukturze
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
Budowa robotów przemysłowych 1. Podstawowe zespoły i układy robotów przemysłowych Obecnie produkowan
więcej podobnych podstron