HPIM0773

i. Budowa robotów priemyslowyth
■
3.3. Roboty o budowie modułowej i szereguwej strukturze kinematycznej
- nowoczesnością i estetyką rozwiązań,
~ odpornością na korozję i zadrapaniu, dzięki anodowanej powierzchni.
Produkcją profili aluminiowych zajmuje się wiele firm (np. BOSCH [KI ]# 1TEM [K3|). Firmy te opracowały modułowy zestaw do montażu urządzeń wy* twórczych, warsztatowych, pomocniczych na bazie duraluminiowych profili zamkniętych i szerokiej gamy elementów funkcjonnlnych, wykorzystując orygj* nnłną technikę połączeń śrubowych. Przykładowe przekroje profili systemu BOSCH pokazano na rys. 3.18. Rozwiązanie oparto na zunifikowanych powtarzalnych i podobnych elementach podstawowych. Elementy te różnią się tyko wielkością, a ich kształt jest identyczny lub zbliżony.


1
i
i
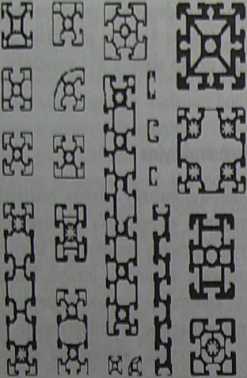



Rysunek 3i1B > y;' . . . ___-
Przykładowe przekroje profili systemu BOSCH [KI]
Przykładem profili aluminiowych stanowiących podstawę do całej bazy elementów o budowie modułowej są profile firmy 1TEM MB System. W skład zestawu MB wchodzą różne kombinacje profilu podstawowego (rys. 3.19).
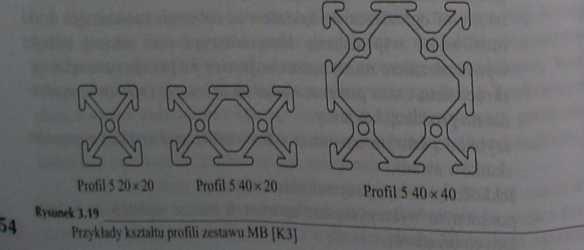

Kolejne profile są modyfikacjami wersji pierwotnej, mają tylko większe gabaryty, u tym samym lepsze właściwości technologiczne. Kolejne elementy po-wstają z profilu podstawowego przez dodawanie do niego jego wielokrotności.
W tablicach 3.1 i 3.2 przedstawiono dane techniczne profili aluminiowych.
Tablica 3.1. Dmie techniczne różnych odmian profilu 5ITEM [K3]
|
Profil |
Pole powierzchni cm2 |
Masa kg/m |
Momcnl bezwładności /, cm4 |
Moment bezwładności /.. cm4 |
|
20x20 |
1,80 |
0,48 |
0,72 |
0,72 |
|
40x20 |
3,32 |
0,89 |
0,97 |
5,14 |
|
40x40 |
5,14 |
1,39 |
5,42 |
5,42 |
W skład systemów o budowie modułowej, oprócz profili, wchodzą:
- listwy i pokrywy maskujące i osłonowe aluminiowe i z tworzyw sztucznych,
- elementy złączne, zawiasy, wsporniki, rolki, kółka, stopki, elementy blokujące itp.,
- podzespoły przemieszczeń liniowych z kasacją luzów, napędzane ręcznie, pneumatycznie lub elektrycznie (za pomocą pasków zębatych lub śrub tocznych),
- podzespoły i elementy instalacyjne do elektrotechniki i elektroniki,
- elementy i podzespoły do budowy ścianek, przegród i drzwi.
W ofercie firm jest wiele rozwiązań połączeń śrubowych. Rodzaj połączenia śrubowego jest dobierany w zależności od wymagań wytrzymałościowych, technologicznych, funkcjonalnych czy estetycznych. Jednym z nich jest połączenie śrubą centralną samogwintującą (rys. 3.20). Niewątpliwą zaletą tego rozwiązania jest jego niewielka cena (koszt śruby i wykonania otworu -bez gwintowania). Jest to idealne rozwiązanie, kiedy panel albo szyba wchodzi w szczelinę.
Innym możliwym rozwiązaniem jest połączenie śrubami młoteczkowymi za pomocą kątownika, połączenie sworzniowe za pomocą śruby młoteczkowej (rys. 3.21). Dzięki specjalnej konstrukcji łba śruby możliwe jest jej wprowadzenie w dowolnym miejscu rowka i unieruchomienie przez obrót o 90°, nawet gdy czoło rowka nie jest dostępne. Umożliwia to bardzo szybki montaż (także w późniejszym stadium powstawania konstrukcji).
Gdy są konieczne połączenia profili pod kątem, można użyć łączników kątowych; o stałym kącie między dwoma profilami (rys. 3.22) lub o kącie zmiennym. Połączenia o stałym kącie są bardzo stabilne, o dużej wytrzy małości. Uzyskuje się to dzięki podobnym połączeniom sworzniowym jak w przypadku poprzednim.
Wyszukiwarka
Podobne podstrony:
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
HPIM0793 4. 4.2. Kinematyka robotów o strukturze szeregowej tfmoł*v przypadWc odwzorowywania układów
2. Elementy składowe i budowa robotów2.1. Podstawowe układy robotów Roboty przemysłowe składają się
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
więcej podobnych podstron