HPIM0793
4.
4.2. Kinematyka robotów o strukturze szeregowej
tfmoł*v przypadWc odwzorowywania układów
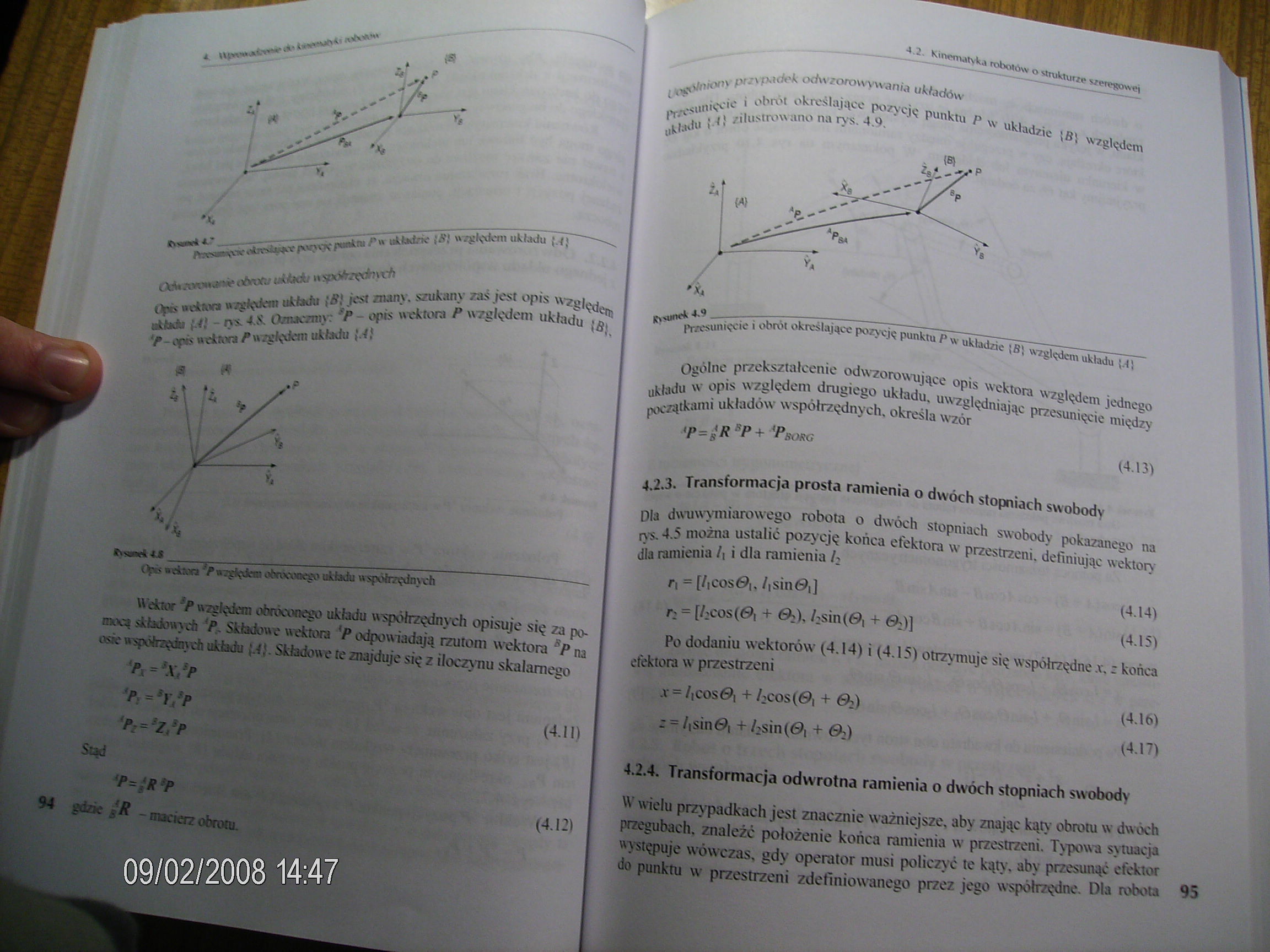
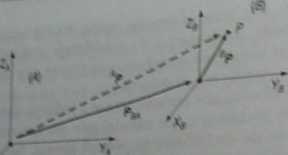
unj^ic i obrót określające pozycję punktu P w układzie {P} względem układu {i! zilustrowano na rys. 4.9.
%
twii:
***** {Bl układu [A\
OfajOKtyjr'* obrotu ufchdł n^pókzęchwh
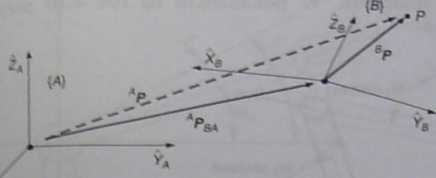
Qpg nbm \vi§M«tt ukbdu [B\ jest many. szukany zaś jest opis względem ufrfrfr cy^-kS. Oznaczmy: SP - opis wektora P względem układu {B)% >-<ęewektcoP\\zgMcm układu J.4J
1 ft

1F& I
_;_
Ops Ktaao ff »-agłęiqa oferocooego układu współrzędnych
Wektor 'P względem obróconego układu współrzędnych opisuje się za po-mccą składowych ‘P- Składowe wektora łP odpowiadają rzutom wektora BP na osie współrEędn>xh układu J.ł}. Składowe te znajduje się z iloczynu skalarnego
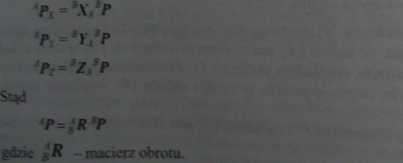
(4.12)
RyMncfc 4.9 _______
Przesunięcie i obrót określające pozycję punktu P wr układzie {£} względem układu {.4}
Ogólne przekształcenie odwzorowujące opis wektora względem jednego układu w opis względem drugiego układu, uwzględniając przesunięcie między początkami układów współrzędnych, określa wzór
(4.13)
4.2.3. Transformacja prosta ramienia o dwóch stopniach swobody
Dla dwuwymiarowego robota o dwóch stopniach swobody pokazanego na rys. 4.5 można ustalić pozycję końca efektora w przestrzeni, definiując wektory dla ramienia /| i dla ramienia /j
ri = [/icos^u /|SinĆ?(] (4.14)
r> = [/2C0S(^1 + Ą), /2sin(<9i + (4.15)
Po dodaniu wektorów (4.14) i (4.15) otrzymuje się współrzędne .r. r końca efektora w przestrzeni
.V = /icos^i +/2Cos(^i + Ą) (4.16)
| = ł\sin&i + /2sin(d| + Ą) (4.17)
4.2.4. Transformacja odwrotna ramienia o dwóch stopniach swobody
W wielu przypadkach jest znacznie ważniejsze, aby znając kąty obrotu w dwóch przegubach, znaleźć położenie końca ramienia w przestrzeni. Typowa sytuacja występuje wówczas, gdy operator musi policzyć te kąty. aby przesunąć efektor do punktu w przestrzeni zdefiniowanego przez jego współrzędne. Dla robota 95
Wyszukiwarka
Podobne podstrony:
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0773 i. Budowa robotów priemyslowyth ■ 3.3. Roboty o budowie modułowej i szereguwej strukturze
HPIM0790 4- Wprowadzenie do kinematyki robotów - w przypadku ruchów obrotowych (A, B,C) w kierunku p
Rys. 2. Struktury i przestrzenie robocze robotów stacjonarnych o szeregowym układzie kinematycznym:
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0791 •4. Wprowadzenie do kinematyki robotów Rysunek -v • ■
HPIM0792 ; 4. Wprowadzenie do kinematyki robotów Naldalej przykłady będą częściej dotyczyć tej konfi
HPIM0796 4. Wprowadzenie do kinematyki robotów Wartości /, </>oraz (9 można obliczyć z
HPIM0797 4. Wprowmiienle do kinematyki robotów go. Zgodnie z tym, opierając się na współrzędnych pun
HPIM0798 wm§ 4. Wprowadzeni* do kinematyki robotów Do wyznaczenia kąta 0 wykorzystuje się twierdzeni
2zestawqn5 Zestaw l 1. Wymienić i narysować podstawowe struktury kinematyczne robo
Image 21 2. Kinematyka robotów przemysłowych 2.1. Struktura kinematyczna robotów przemysłowych Teore
66050 P1080220 4. Wprowadzenie do kinematyki robotów - w przypadku ruchów obrotowych (A, B, C) w kie
3zestawnp7 1. Wymienić i narysować podstawowe struktury kinematyczne robotów. Okre
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
więcej podobnych podstron