3zestawnp7
1. Wymienić i narysować podstawowe struktury kinematyczne robotów. Określić przestrzeń roboczą dla każdej struktury.
2. Narysować schemat serwomechanizmu z regulatorem P i sprzężeniem tachometrycznym. Wyznaczyć transmitancję oraz błąd ustalony dla zaktóccnia skokowego.
3. Wyjaśnić cel stosowania przekładni w napędach robotów wykorzystujących silniki prądu stałego. Wymienić i opisać typowe przekładnie.
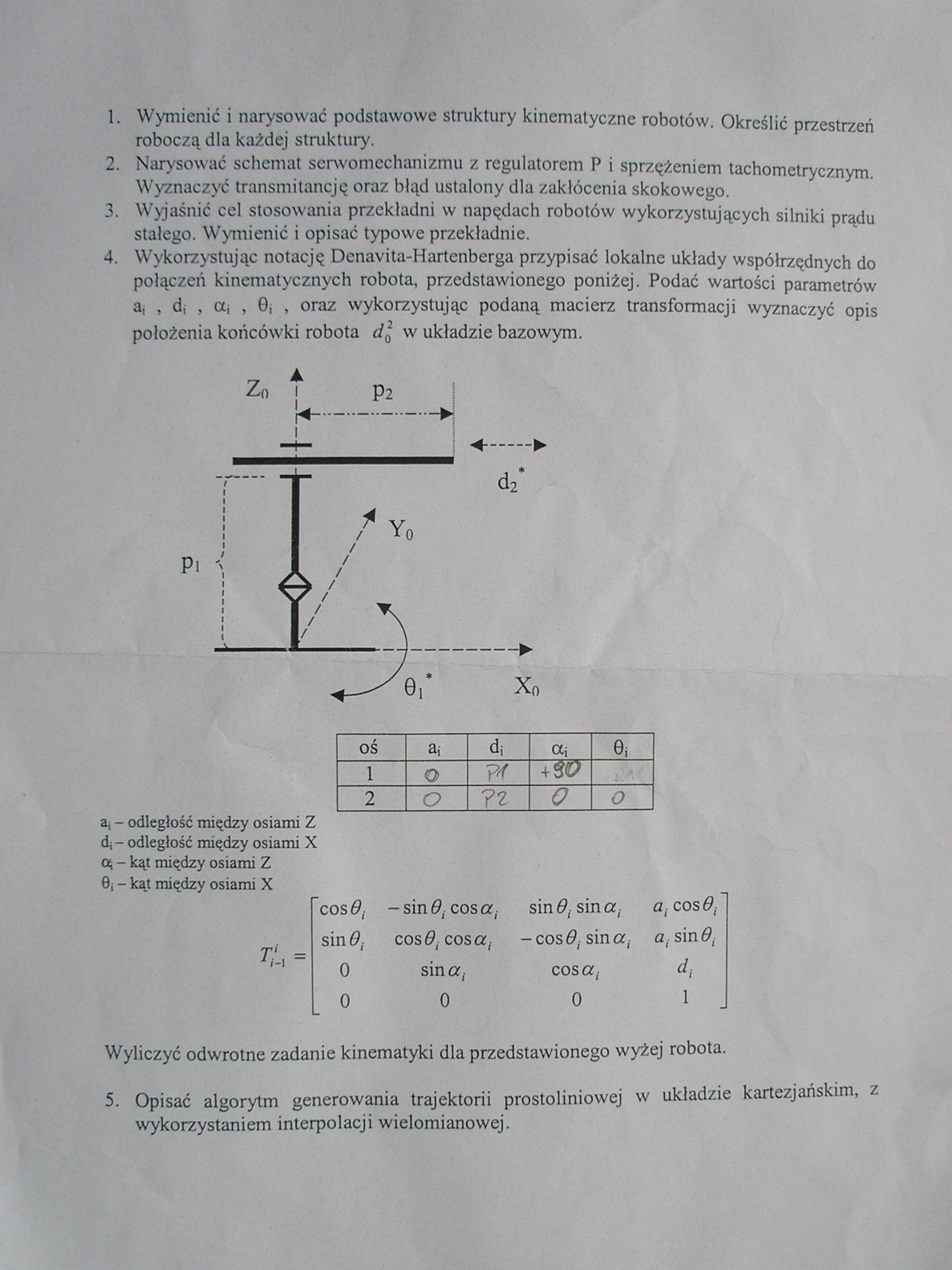
4. Wykorzystując notację Denavita-Hartenberga przypisać lokalne układy współrzędnych do połączeń kinematycznych robota, przedstawionego poniżej. Podać wartości parametrów a, , d, , cii , 0, , oraz wykorzystując podaną macierz transformacji wyznaczyć opis położenia końcówki robota d] w układzie bazowym.
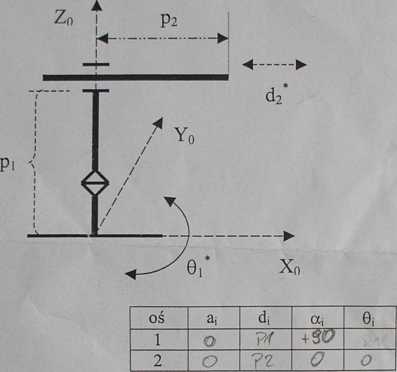
aj - odległość między osiami Z dj - odległość między osiami X O; - kąt między osiami Z 0j - kąt między osiami X
|
cos 9, |
-sin 9i cos a. |
|
sin |
cos 0; cos ai |
|
0 |
sina,. |
|
0 |
0 |
sin 0, sin a, cos <9, - cos 9; sin a, ,• sin
cos a, dj
0 1
Wyliczyć odwrotne zadanie kinematyki dla przedstawionego wyżej robota.
5. Opisać algorytm generowania trajektorii prostoliniowej w układzie kartezjańskim, z wykorzystaniem interpolacji wielomianowej.
Wyszukiwarka
Podobne podstrony:
2zestawqn5 Zestaw l 1. Wymienić i narysować podstawowe struktury kinematyczne robo
Image 21 2. Kinematyka robotów przemysłowych 2.1. Struktura kinematyczna robotów przemysłowych Teore
15. Podstawowe schematy kinematyczne robotów stacjonarnych. Na podstawie materiałów prof. C.H.U.Y. G
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0793 4. 4.2. Kinematyka robotów o strukturze szeregowej tfmoł*v przypadWc odwzorowywania układów
grG Podstawy Chemii Organicznej CHC 0131w, (23.06.2009) ZESTAW „G” 1. Narysować wzory strukturalne
/.ul.mi.i i odpowiadające im podstawowe struktury rachunku sprawozdawczego kosztów Określenie jakie
podstawowych pojęć z mechatroniki i robotyki omawia się struktury kinematyczne mechanizmów robotroni
DSCI2464 Zadanie XI. (O - 2) (standard II) Na podstawie analizy mapy wymień trzy obszary upraw pszen
P1010180 Podstawy Chemii Organicznej CMC 0131w, (23.06.2009) ZESTAW .G* I. Narysować wzory struktura
2. STRUKTURA ROBOTÓW PRZEMYSŁOWYCH I MANIPULATORÓW (RPiM)2.1. STRUKTURA KINEMATYCZ
badanego zbioru, jego liczebności itp. czynników. Do podstawowych strukturalnych określeń wzajemnych
Image 27 31 Rys 2.5. Przykłady struktur kinematycznych typowych robotów przemysłowych wg [9] Rys. 2.
88615 P1080235 4. Wprowadzenie do kinematyki robotów Korzystając z tych oznaczeń, można określić prę
więcej podobnych podstron