2zestawqn5
Zestaw l
1. Wymienić i narysować podstawowe struktury kinematyczne robotów. Określić przestrzeń roboczą dla każdej struktury. Podać, od czego zależy „klasa" pary kinematycznej i która klasa par kinematycznych występuje w typowym łańcuchu kinematycznym robota.
2. Narysować schemat serwomechanizmu z regulatorem P: bez i ze sprzężeniem tachometrycznym. Wyznaczyć transmitancje dla obu układów oraz wyjaśnić wpływ sprzężenia tachometrycznego na błąd ustalony (dla wymuszenia i zakłócenia) oraz na własności dynamiczne układu.
3. Porównać napędy pneumatyczne, hydrauliczne i elektryczne stosowane w robotach z
punktu widzenia: rodzaju układu sterowania, momentu napędowego, sposobu
pozycjonowania.
4. Wyjaśnić pojęcia: „pozycja” i „orientacja” wykorzystywane w opisie kinematyki robota.
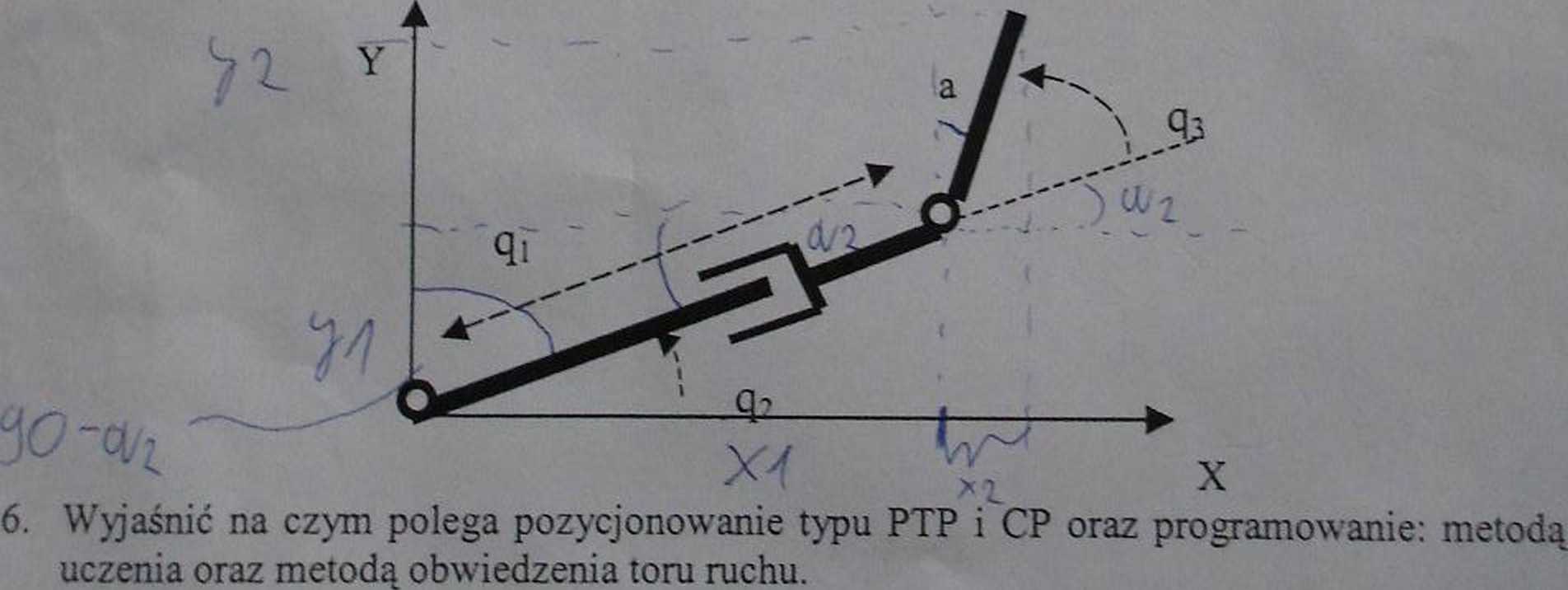
5. Zdefiniować i wyliczyć proste i odwTOtne zadanie kinematyki pozycji dla pokazanego poniżej robota o trzech stopniach swobody:
Wyszukiwarka
Podobne podstrony:
3zestawnp7 1. Wymienić i narysować podstawowe struktury kinematyczne robotów. Okre
grG Podstawy Chemii Organicznej CHC 0131w, (23.06.2009) ZESTAW „G” 1. Narysować wzory strukturalne
Image 21 2. Kinematyka robotów przemysłowych 2.1. Struktura kinematyczna robotów przemysłowych Teore
15. Podstawowe schematy kinematyczne robotów stacjonarnych. Na podstawie materiałów prof. C.H.U.Y. G
P1010180 Podstawy Chemii Organicznej CMC 0131w, (23.06.2009) ZESTAW .G* I. Narysować wzory struktura
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0793 4. 4.2. Kinematyka robotów o strukturze szeregowej tfmoł*v przypadWc odwzorowywania układów
Zestaw 1 1. Wymień instrumenty kredytu kupieckiego 2. Podstawy
podstawowych pojęć z mechatroniki i robotyki omawia się struktury kinematyczne mechanizmów robotroni
2. STRUKTURA ROBOTÓW PRZEMYSŁOWYCH I MANIPULATORÓW (RPiM)2.1. STRUKTURA KINEMATYCZ
Zestaw 1 1. Wymień instrumenty kredytu kupieckiego 2. Podstawy
Image 27 31 Rys 2.5. Przykłady struktur kinematycznych typowych robotów przemysłowych wg [9] Rys. 2.
skanuj011001 stiuktuia dcUiońowa atomu jodu — stan podstawowy struktuia elektronowa atomu jodu tworz
więcej podobnych podstron