2740389866
2. STRUKTURA ROBOTÓW PRZEMYSŁOWYCH I MANIPULATORÓW (RPiM)
2.1. STRUKTURA KINEMATYCZNA RPiM
2.1.1. System ruchu stacjonarnych RPiM
Na podstawie wyżej wymienionych definicji robotów i z ogólnego spojrzenia na te skomplikowane urządzenia można wyraźnie wywnioskować, że roboty przemysłowe należy rozumieć jako pewien podzbiór robotów jako takich. Te reprezentowane są w szczególności przez roboty mobilne wykorzystujące różnych typów podwozia kołowe lub pasowe do przemieszczania, lub roboty z nogami, czasem nawet wykonane na podobieństwo zwierząt lub androidów. Szczególnie w systemach robotów mobilnych, ramię stanowi mechanizm manipulacji, który praktycznie jest, z globalnego punktu widzenia, systemem pozycjonowania samym w sobie. Może być używany jako stacjonarny robot przemysłowy i może być dodatkowo wyposażony w proste lub bardziej skomplikowane mechanizmy poruszania.
W zakresie budowy RPiM system ruchu można podzielić w następujący sposób:
- mechanizm poruszania
- mechanizm pozycjonowania
- mechanizm orientacji
- efektory końcowe
Zgodnie z Rys. 2-1, punkt odniesienia "Br" znajduje się pomiędzy mechanizmem pozycjonowania i orientacji. Punkt ten kończy podstawowy łańcuch kinematyczny (PŁK), składający się z mechanizmu pozycjonowania, czasami również rozszerzonego o mechanizm poruszania się. Łańcuch kinematyczny (ŁK) składa się z podstawowego łańcucha kinematycznego i mechanizmu orientacji. Pomiędzy mechanizmem orientacji i końcowym efektorem może znajdować się kompensator położenia. Podział elementów systemu ruchu robotów wyposażonych w liniowy mechanizm poruszania się jest przedstawiony na Rys. 2-1.
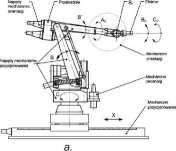
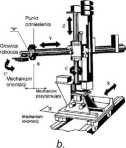
Rys. 2-1: Przykładowe wyszczególnienie elementów systemu ruchu stacjonarnego robota przemysłowego.
a. Przemysłowy robot adaptacyjny APR- 20 VUKOV-PREŚOV (SK)
b. Robot przemysłowy BEROE RB-321(BG)
X - mechanizm poruszania
mechanizm pozycjonujący - CBB’ (APR-20), CZY (BEROE RB-321)
Br - punkt odniesienia
A o, B0, C0 - mechanizm orientacji (zakresy możliwych ruchów)
X, Y, Z- translacja wzdłuż osix, y, z A, B, C- rotacja wzdłuż osi x, y, z
AO, B0, C0 - rotacja wzdłuż osi mechanizmu orientacyjnego
Wyszukiwarka
Podobne podstrony:
2.1.2. Pary kinematyczne w budowie RPiM System ruchu robotów przemysłowych i manipulatorów (RPiM) je
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
Robot przemysłowy Struktury kinematyczne manipulatorów przemysłowych Do opisu ruchu manipulatorów
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
Image 21 2. Kinematyka robotów przemysłowych 2.1. Struktura kinematyczna robotów przemysłowych Teore
Image 27 31 Rys 2.5. Przykłady struktur kinematycznych typowych robotów przemysłowych wg [9] Rys. 2.
Analiza struktury kinematycznej manipulatora typu Tiiplanar^
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
2zestawqn5 Zestaw l 1. Wymienić i narysować podstawowe struktury kinematyczne robo
Spis rysunków 2.1 Struktura kinematyczna manipulator ZS5R.................. 8 2.2
więcej podobnych podstron