Image 27
31
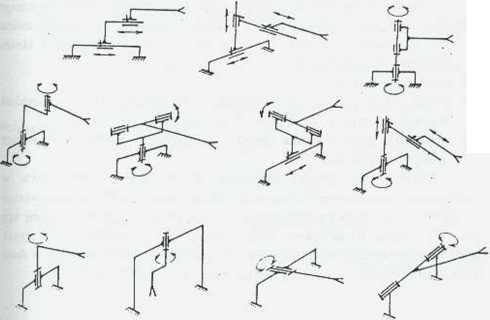
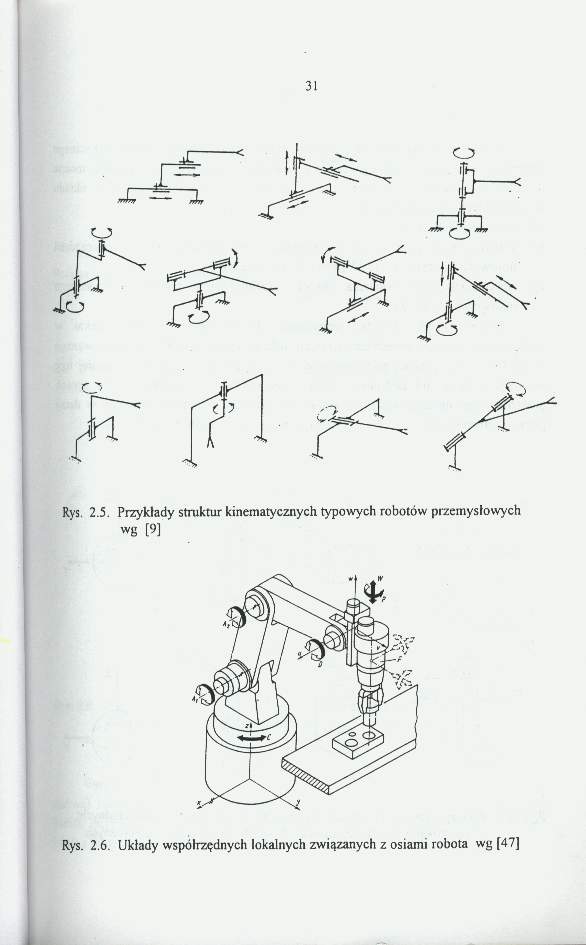
Rys 2.5. Przykłady struktur kinematycznych typowych robotów przemysłowych wg [9]
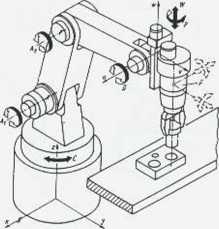
Rys. 2.6. Układy współrzędnych lokalnych związanych z osiami robota wg [47]
Wyszukiwarka
Podobne podstrony:
Image 122 125 Przykłady struktur kinematycznych mechanizmów chwytaków przedstawiono na rysunkach 5.1
Image 100 4. Przekładnie ruchu 4.1. Charakterystyka przekładni W układach napędowych robotów przemys
Image 66 70 Rys. 3.27. Przykłady rozwiązań konstrukcyjnych robotów przemysłowych z napędem elektrycz
Image 123 126 Rys. 5.12b. Struktury kinematyczne chwytaków zawierające pary kinematyczne IV i V klas
Slajd31 Skomplikowane warunki gruntowe Zapadowość: komórkowa struktura gruntu Typowy przykład: lessy
CCF20120324�021 00 <r> Rys. 10.7. Przykład struktury planu aieoiowego
31 (340) Przykład 6.4 129 IPE 240 f Rys. 6.6 tsirt/fkwsw IPE 400 bl.
84 (91) 84 Rys. 4.29. Rysunek aksonometryczny - przykłady do zadania 4.1 Rys. 4.31 Rys. 4.30. Przykł
20022 P1030336 254 M.Polowczyk. EKIugmann - PRZYRZĄDY PÓŁPRZEWODNIKOWE Rys. 633. Przykłady struktur
42 (417) 1 UMwty fitMu* W WWlW ItlaakW 42 BD KO/WIA/ANU PRZYKŁAD 1.31 RYS. 1.33 N
10002 2 Rys. 10.5.1. Przykładowa struktura organizacyjna przedsiębiorstwa o trzech poziomach zarządz
6-2012 TRIBOLOGIA 31 Rys. 4. Przykład fragmentu charakterystyki tribologicznej dla: a) systemu
12 Rys. 8. Przykłady par kinematycznych I-s-V klasy
Rys. 13. Przykłady łańcuchów kinematycznych2.3.2. Formy zapisu łańcuchów kinematycznych W
więcej podobnych podstron