Image 123
126
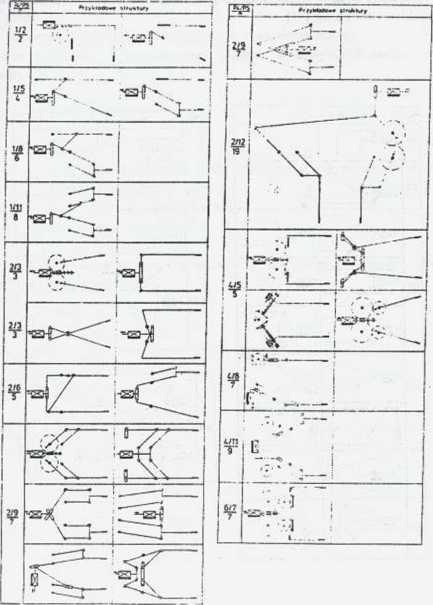
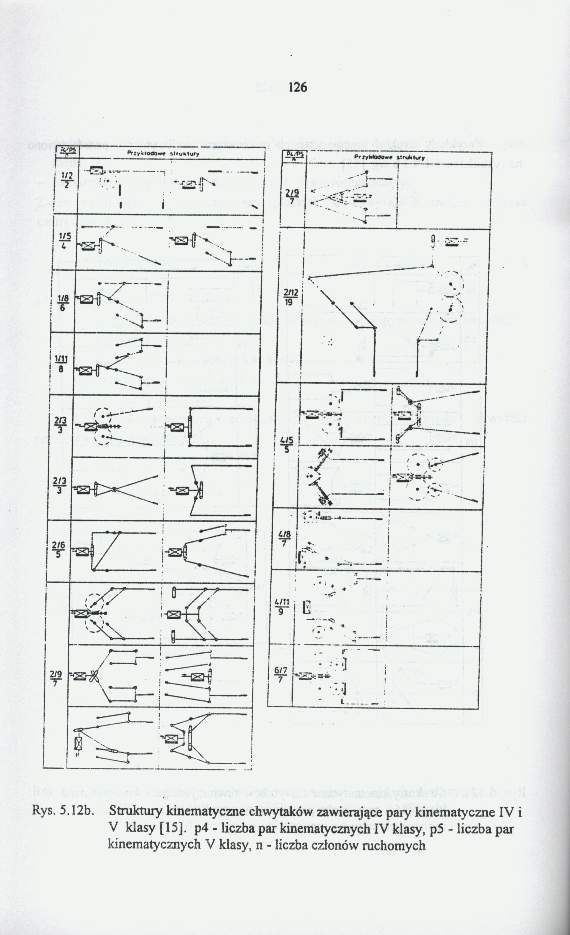
Rys. 5.12b. Struktury kinematyczne chwytaków zawierające pary kinematyczne IV i V klasy [15]. p4 - liczba par kinematycznych IV klasy, p5 - liczba par kinematycznych V klasy, n - liczba członów ruchomych
Wyszukiwarka
Podobne podstrony:
Image 27 31 Rys 2.5. Przykłady struktur kinematycznych typowych robotów przemysłowych wg [9] Rys. 2.
Image 125 128 Rys. 5.13. Końcówki chwytne chwytaków [6,26]. a - sztywne, b - sprężyste, c - elastycz
Image 122 125 Przykłady struktur kinematycznych mechanizmów chwytaków przedstawiono na rysunkach 5.1
S6302501 wzdłuż- Rys. 2.5. Zapis strukturalny schematu kinematycznego tokarki produkcyjnej TPC 40 39
13 Rys. 2.4. Pizy kładowe struktury kinematyczne stacjonarnych manipulatorów bezchwy takowy c h
Image 04 10 a btu i Rys. 1.1. Schemat łańcucha kinematycznego: a - ŁK zamknięty; b - ŁK otwarty b a
Image 130 133 Rys. 5.17. Chwytak podciśnieniowy. Przykład wg [26] Króciec przyłączający Czasza przys
Image 21 2. Kinematyka robotów przemysłowych 2.1. Struktura kinematyczna robotów przemysłowych Teore
Image 114 117 Rys. 5.5. Sposoby chwytania detalu: a - siłowy, b - kształtowy, c - siłowo-kształtowy.
24 luty 07 (155) Rys. 4.8. Modelowanie i analiza kinematyczna mechanizmu złożonego o strukturze szer
więcej podobnych podstron