66050 P1080220

4. Wprowadzenie do kinematyki robotów
- w przypadku ruchów obrotowych (A, B, C) w kierunku prawoskrętnym, uwzględniając dodatni zwrot odpowiadających im osi układów współ-rzędnych Y,Z.
5. Układy osi współrzędnych dwóch pozostałych części struktury kinematycznej, występujących w mechanizmie, a mianowicie lokalnej i globalnej, są identyczne, jeśli chodzi o kierunek i zwrot osi z układem podstawowym i związane odpowiednio z ostatnim zespołem lokalnego lub globalnego odcinka łańcucha kinematycznego mechanizmu.
6. Zespoły ruchu - człony mechanizmu - oznacza się dużymi literami X, Y, Z, A, B, C odpowiednio do oznaczeń osi współrzędnych i rodzaju ruchu i dodaje indeks G. r. l (np- Cr), w zależności od odcinka łańcucha kinematycznego, w którym występują
7. Syntetyczny zapis struktury łańcucha kinematycznego mechanizmu robota jest uporządkowanym zbiorem oznaczeń występujących w nim zespołów ruchu; zbiór rozpoczyna pierwszy po podstawie, a kończy ostatni przed chwytakiem lub narzędziem zespół mchu mechanizmu.
8. Wielokrotność występowania zespołu mchu danego rodzaju w tym samym odcinku łańcucha kinematycznego rozróżnia się przez numerowanie, a krotność łańcucha w obrębie całego mechanizmu lub jego wybranej części - przez zapis równoległo-szeregowy.
Przykłady tworzenia układów odniesienia wraz ze wskazaniem mchów liniowych i obrotowych przedstawiono na rys. 4.2. Ruchy X, Y, Z określono jako przesunięcia liniowe, mchy A,B,C- jako obrotowe względem poszczególnych osi.
a) b) c)
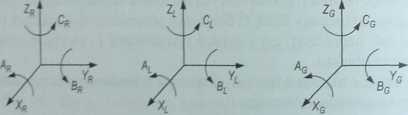
Rysunek 4.1 _____~ _ ' . _
Układy odniesienia robota przemysłowego: a) regionalny, b) lokalny, c) globalny
Wykorzystując pokazane układy odniesienia (rys. 4.2) oraz schemat kinematyczny robota, zapis jego struktury można przedstawić w postaci symbolicznej. Na rysunku 4.3 zilustrowano zasadę zapisu struktury robota o strukturze kinematycznej (C/h, Aru Ajq, Am, CL, Bm Pierwszym członem zapisu struktury kinematycznej jest zespół 1 ruchu regionalnego (C/?j), ostatnim członem - zespół 3 ruchu lokalnego (Bt).
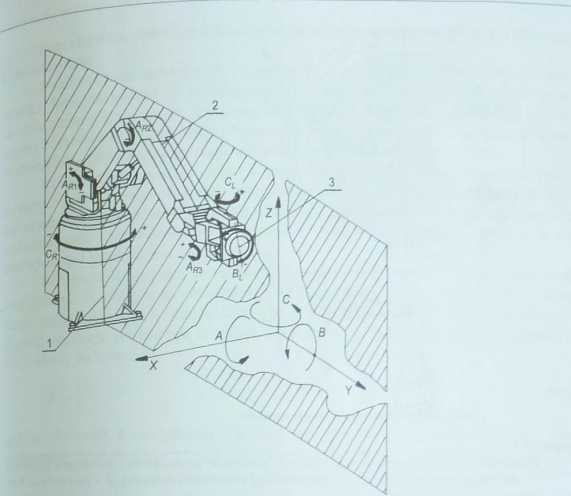
Rysunek ^_
Określenie ipodstawowego układu osi współrzędnych, kierunków ruchu i zapisu struktury mechanizmu robota; 1 — podstawa, 2 — zespół ruchu, 3 - sprzęg chwytaka
Tak przedstawiony zapis umożliwia wskazanie; liczby stopni swobody, układu współrzędnych ruchów regionalnych ramienia oraz możliwości kinematycznych robota. O przynależności zespołu ruchu do części globalnej, regionalnej lub lokalnej mechanizmu jednostki kinematycznej rozstrzyga konstrukcja (geometria) członu oraz mechanizm przemieszczeń. Dla znacznej części rozwiązań granicę poszczególnych odcinków ruchu wskazuje producent.
Podstawowy układ osi współrzędnych jest związany z mechanizmem jednostki kinematycznej robota (stąd nazwa układ maszynowy) i zmienia swe położenie wraz z przemieszczaniem członów mechanizmu. Aby określić te przemieszczenia, a wynikowo przemieszczenia chwytaka lub narzędzia robota, wprowadza się dodatkowy układ osi współrzędnych, związany z przestrzenią stanowiska roboczego, w którym jest osadzona jednostka kinematyczna (układ odniesienia). W pracy [93] proponuje się, że osie układu odniesienia i układu maszynowego powinny pokrywać się w normalnym (katalogowym) położeniu członów łańcucha kinematycznego mechanizmu robota. 87
Wyszukiwarka
Podobne podstrony:
HPIM0790 4- Wprowadzenie do kinematyki robotów - w przypadku ruchów obrotowych (A, B,C) w kierunku p
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron