HPIM0791
•4. Wprowadzenie do kinematyki robotów
Rysunek -v''•'■ . _______
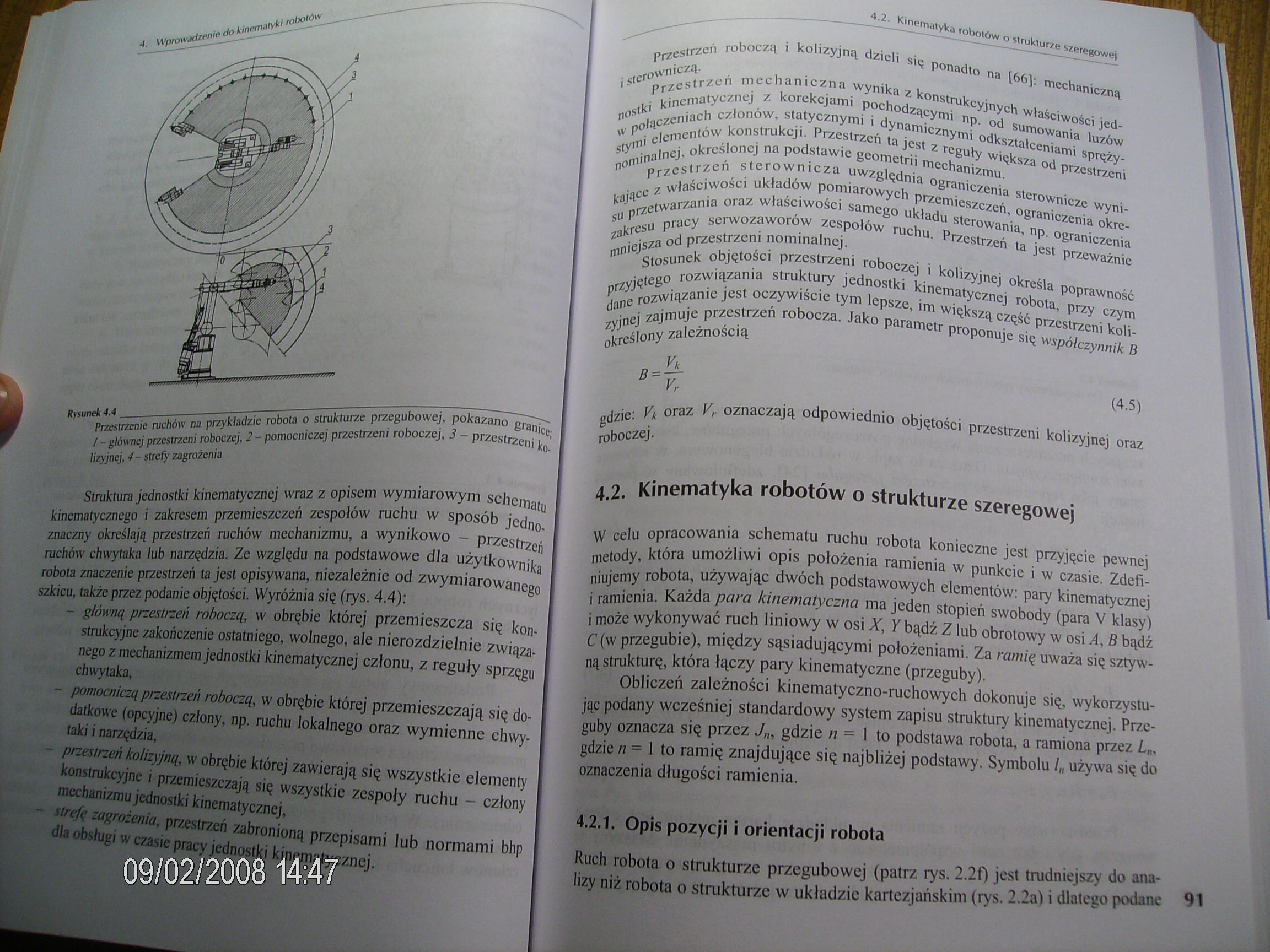
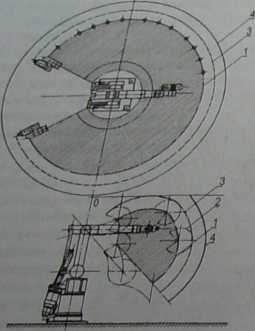
Przestrzenie ruchów na przykładzie robota o strukturze przegubowej, pokazano granice; 1 - głównej przestrzeni roboczej, 2 - pomocniczej przestrzeni roboczej, 3 - przestrzeni kolizyjnej, 4 - strefy zagrożenia
Struktura jednostki kinematycznej wraz z opisem wymiarowym schematu kinematycznego i zakresem przemieszczeń zespołów ruchu w sposób jedno*
n
no
szi
Przestrzeń roboczą i kolizyjną dzieli się ponadto na [66]: mechaniczną i sterowniczą.
Przestrzeń mechaniczna wynika z konstrukcyjnych właściwości jednostki kinematycznej z korekcjami pochodzącymi np. od sumowania luzów w połączeniach członów, statycznymi i dynamicznymi odkształceniami sprężystymi elementów konstrukcji. Przestrzeń ta jest z reguły większa od przestrzeni nominalnej, określonej na podstawie geometrii mechanizmu.
Przestrzeń sterownicza uwzględnia ograniczenia sterownicze wynikające z właściwości układów pomiarowych przemieszczeń, ograniczenia okresu przetwarzania oraz właściwości samego układu sterowania, np. ograniczenia zakresu pracy serwozaworów zespołów ruchu. Przestrzeń ta jest przeważnie niniejsza od przestrzeni nominalnej.
Stosunek objętości przestrzeni roboczej i kolizyjnej określa poprawność przyjętego rozwiązania struktury jednostki kinematycznej robota, przy czym dane rozwiązanie jest oczywiście tym lepsze, im większą część przestrzeni kolizyjnej zajmuje przestrzeń robocza. Jako parametr proponuje się współczynnik B określony zależnością

gdzie: Vt oraz Vr oznaczają odpowiednio objętości przestrzeni kolizyjnej oraz roboczej.
4.2. Kinematyka robotów o strukturze szeregowej
W celu opracowania schematu ruchu robota konieczne jest przyjęcie pewnej metody, która umożliwi opis położenia ramienia w punkcie i w czasie. Zdefiniujemy robota, używając dwóch podstawowych elementów: pary kinematycznej i ramienia. Każda para kinematyczna ma jeden stopień swobody (para V klasy) i może wykonywać ruch liniowy w osi X% Y bądź Z lub obrotowy w osi A, B bądź C (w przegubie), między sąsiadującymi położeniami. Za ramię uważa się sztywną strukturę, która łączy pary kinematyczne (przeguby).
Obliczeń zależności kinematyczno-ruchowych dokonuje się, wykorzystując podany wcześniej standardowy system zapisu struktury kinematycznej. Przeguby oznacza się przez Jn, gdzie n = 1 to podstawa robota, a ramiona przez Lm% gdzie n = 1 to ramię znajdujące się najbliżej podstawy. Symbolu l„ używa się do oznaczenia długości ramienia.
4.2.1. Opis pozycji i orientacji robota
Ruch robota o strukturze przegubowej (patrz rys. 2.2f) jest trudniejszy do analizy niż robota o strukturze w układzie kartezjańskim (rys. 2.2a) i dlatego podane 91
Wyszukiwarka
Podobne podstrony:
HPIM0798 wm§ 4. Wprowadzeni* do kinematyki robotów Do wyznaczenia kąta 0 wykorzystuje się twierdzeni
P1080227 4. Wprowadzenie do kinematyki robotów Rysunek 4.15 _____ Układy współrzęd
80882 P1080221 4. Wprowadzenie do kinematyki robotów Rysunek i _■
P1080225 4. Wprowadzenie do kinematyki robotów Rysunek 4.12__ Robot o trzech stopniach swobody w prz
HPIM0790 4- Wprowadzenie do kinematyki robotów - w przypadku ruchów obrotowych (A, B,C) w kierunku p
HPIM0792 ; 4. Wprowadzenie do kinematyki robotów Naldalej przykłady będą częściej dotyczyć tej konfi
HPIM0796 4. Wprowadzenie do kinematyki robotów Wartości /, </>oraz (9 można obliczyć z
89270 P1080228 Wprowadzenie do kinematyki robotów Trans (X, a)- 0 0 0 a 0 0 0 0 0 0 0 0 0
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
P1080223 4. Wprowadzenie do bnematyłri robotów Rysunek 4^_______ Przesunięcie określające pozycję pu
więcej podobnych podstron