P1080223
4. Wprowadzenie do bnematyłri robotów

Rysunek 4^_______
Przesunięcie określające pozycję punktu P w układzie {B} względem układu {.-4}
Odwzorowanie obrotu układu współrzędnych
Opis wektora względem układu {B} jest znany, szukany zaś jest opis względem układu {A} - iys. 4.8. Oznaczmy: BP - opis wektora P względem układu {B). *P- opis wektora P względem układu {A}
» W

Rysunek 4.3____
Opis wektora eP względem obróconego układu współrzędnych
Wektor BP względem obróconego układu współrzędnych opisuje się za pomocą składowych APt. Składowe wektora AP odpowiadają rzutom wektora P na osie współrzędnych układu {A). Składowe te znajduje się z iloczynu skalarnego
APx = BXABP
(4.1
aPz = bZabP
Stąd
92
gdzie gR - macierz obrotu.
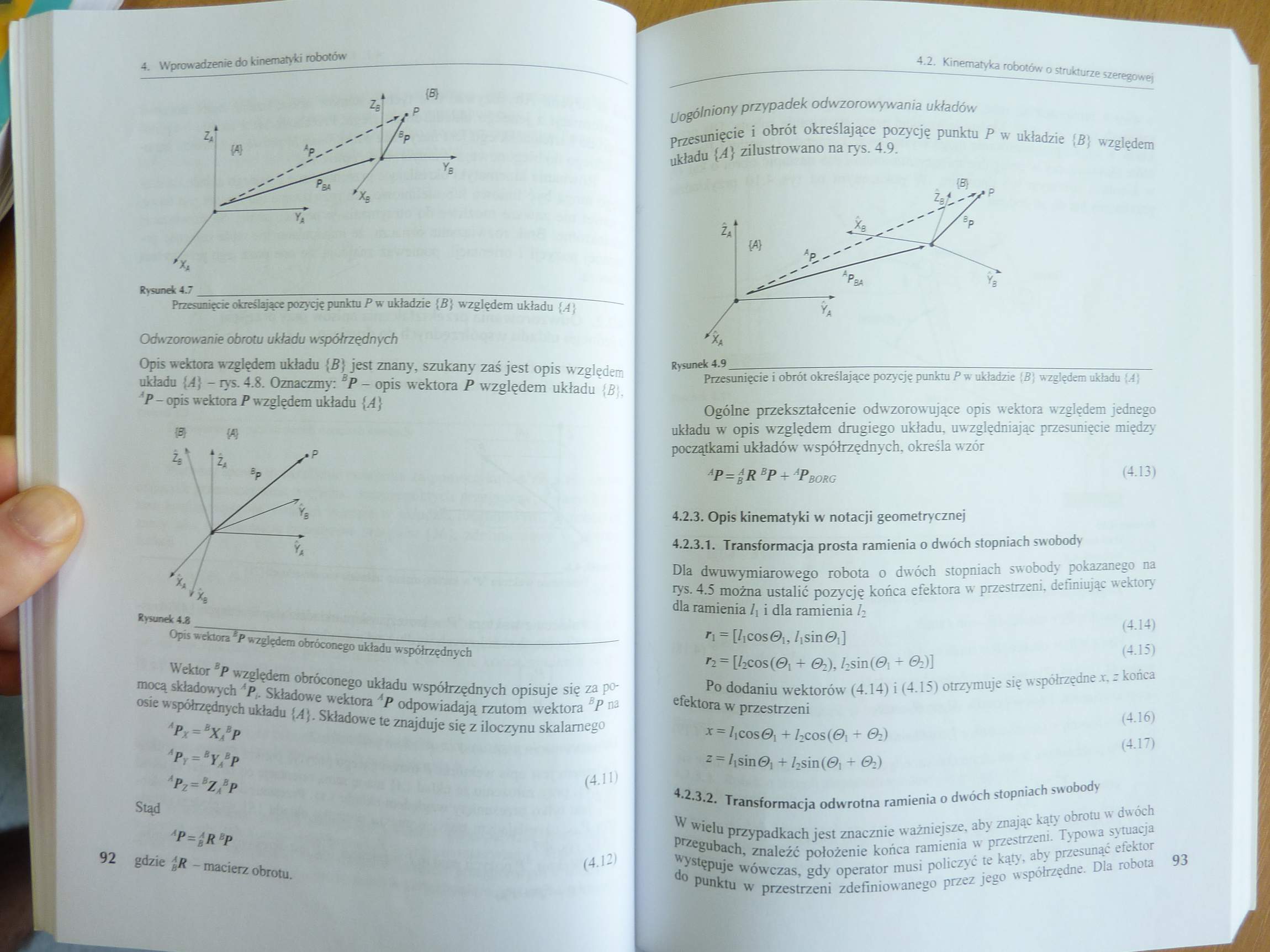
Uogólniony przypadek odwzorowywania układów
Przesunięcie i obrót określające pozycję punktu P w układzie {/?} względem układu {A} zilustrowano na rys. 4.9.
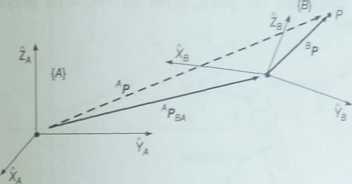
Rysunek 4.^_____
Przesunięcie i obrót określające pozycję punktu P w układzie [B) względem układa {A)
Ogólne przekształcenie odwzorowujące opis wektora względem jednego układu w opis względem drugiego układu, uwzględniając przesunięcie między początkami układów współrzędnych, określa wzór
aP=ŚRbP + aPborg (4.13)
4.2.3. Opis kinematyki w notacji geometrycznej
4.2.3.1. Transformacja prosta ramienia o dwóch stopniach swobody
Dla dwuwymiarowego robota o dwóch stopniach swobody pokazanego na rys. 4.5 można ustalić pozycję końca efektora w przestrzeni, definiując wektory
dla ramienia li i dla ramienia l2
r\ = [/icos&i, /isin6>i] (4.14)
f2= [/2cos(<9i + 02), /;sin(6>i + 6?>)] (4.15)
Po dodaniu wektorów (4.14) i (4.15) otrzymuje się współrzędne x. z końca efektora w przestrzeni
x—/|Cos6>i +12 cos(6>i + 0>) (4.16)
z = /isin6>i +i /2sin(0| + 0?) (4.17)
4.2.3.2. Transformacja odwrotna ramienia o dwóch stopniach swobody
W wielu przypadkach jest znacznie ważniejsze, aby znając kąty obrotu w dwóch przegubach, znaleźć położenie końca ramienia w przestrzeni. Typowa sytuacja występuje wówczas, gdy operator musi policzyć te kąty, aby przesunąć efektor do punktu w przestrzeni zdefiniowanego przez jego współrzędne. Dla robota 93
Wyszukiwarka
Podobne podstrony:
P1080227 4. Wprowadzenie do kinematyki robotów Rysunek 4.15 _____ Układy współrzęd
80882 P1080221 4. Wprowadzenie do kinematyki robotów Rysunek i _■
P1080225 4. Wprowadzenie do kinematyki robotów Rysunek 4.12__ Robot o trzech stopniach swobody w prz
88615 P1080235 4. Wprowadzenie do kinematyki robotów Korzystając z tych oznaczeń, można określić prę
89270 P1080228 Wprowadzenie do kinematyki robotów Trans (X, a)- 0 0 0 a 0 0 0 0 0 0 0 0 0
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
HPIM0791 •4. Wprowadzenie do kinematyki robotów Rysunek -v • ■
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron