P1080225
4. Wprowadzenie do kinematyki robotów
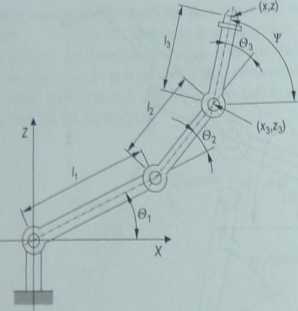
Rysunek 4.12__
Robot o trzech stopniach swobody w przestrzeni dwuwymiarowej
Współrzędne w przestrzeni dla końca ramienia są opisane układem równań 1
X = /|COS(9| + /2COS(@i + ©2) + /jCOS(0i +02+03)
r = pin@i + /2sin(0i + 02) + /jsin(0i + 02 + 03) (4.24) 1
^ = (^ + 02 + 03)
Korzystając z wyników dla robota o dwóch przegubach, można wyznaczyć I transformację odwrotną dla robota o trzech stopniach swobody. Do zdefiniowa I nia pozycji końca ramienia użyte będą oznaczenia x, z, ¥'. Kąt HJ oznacza or\ev I tację kąta nadgarstka.
Mając te wartości, można obliczyć 0\ + 02 + ©3, wprowadzając
XjS8Jt-/)C0s!f'
rj=2 - /jsin V7 ,. ^ t
Mając ustaloną pozycję trzeciego przegubu, problem ustalenia \ sprowadza się do przypadku robota z dwoma stopniami swobody, który by, lizowany wcześniej.
4.23.4. Robot z czterema stopniami swobody w przestrzeni o trzech wymiarach
Na rysunku 4.13 pokazano konfigurację robota o strukturze (£r, Ar\. % w przestrzeni o trzech wymiarach.
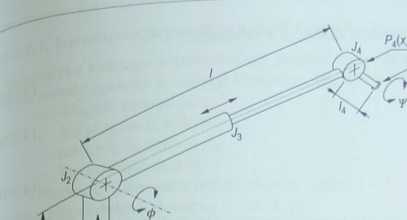
Rysunek 4.^________
Robot o czterech stopniach swobody i strukturze (C*. AK,, YR, Am) w płaszczyźnie trójwymiarowej
Robot ma 4 stopnie swobody: przegub J\ umożliwia obrót wokół osi Z, przegub Jj - obrót wokół osi X, para kinematyczna Ą jest połączeniem liniowym, umożliwiającym przemieszczanie wzdłuż osi Y, przegub J4 umożliwia obrót wokół osi X (równoległej do osi przegubu J2).
Kąt ©jest kątem obrotu przegubu J\9 kąt 0 obrotu przegubu jest kątem wznoszenia, długość liniowego połączenia J$ - rozciągnięciem L kąt *P obrotu przegubu Ją tworzący płaszczyznę YZ - kątem skoku. Oznaczenia te pokazano na rys. 4.13.
Pozycja P końca ramienia jest określona w przestrzeni następująco
(4.26)

4.2. Kinematyka robotów o strukturze szeregowej
Z
P4fa.y4.Z4)
x ® (/coscP+ /4cos \P) cos© y - (/cos<P + /4cos !P)sin<9
z = li + /sin O + /4sin *F
Znając położenie punktu P(.\\ y, z) i kąt skoku P. można znaleźć pozycję przegubów w przestrzeni. Dla punktu P4(.v4, v4, r4), który jest pozycją przegubu A w przestrzeni, otrzymuje się
*4 ** x - /4cos fPcos <9
H m y -I /4COS ^sin <9 (4.27)
z4 ® z - /4sin *P 9
Wyszukiwarka
Podobne podstrony:
P1080227 4. Wprowadzenie do kinematyki robotów Rysunek 4.15 _____ Układy współrzęd
80882 P1080221 4. Wprowadzenie do kinematyki robotów Rysunek i _■
89270 P1080228 Wprowadzenie do kinematyki robotów Trans (X, a)- 0 0 0 a 0 0 0 0 0 0 0 0 0
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
P1080223 4. Wprowadzenie do bnematyłri robotów Rysunek 4^_______ Przesunięcie określające pozycję pu
HPIM0791 •4. Wprowadzenie do kinematyki robotów Rysunek -v • ■
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron