7270841608
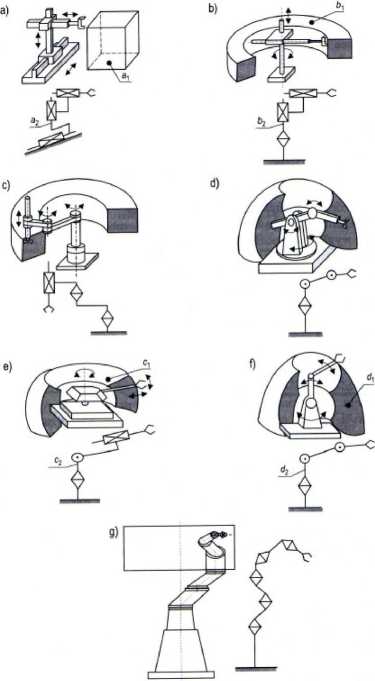
Rys. 2. Struktury i przestrzenie robocze robotów stacjonarnych o szeregowym układzie kinematycznym: a) kartezjańska. b) cylindryczna, c) SCARA, d) PUMA, e) sferyczna, f) przegubowa, g) wielokorbowa
Wyszukiwarka
Podobne podstrony:
M Feld TBM353 8.6. Możliwości obróbki części klasy wał 353 RYS. 8.139. Przestrzeń robocza automatu t
16 a) I-:-;-;-! przestrzeń pracy manipulatora b) Rys. 2.8. Schemat przestrzeni roboczej manipulatora
093 5 Rys. 3.11. Przebieg zmian temperatury gazu w przestrzeni roboczej silnika; i = 13, T = 800 K.
10 2 1164.3. Opis struktury przestrzennej gniazda Przestrzenną strukturę systemu produkcyjnego (rys.
Rys. 5.89. Obróbka elektrochemiczna bezstykowa: a) przestrzeń robocza, b) schemat obróbki łopatki
Rys. 2-5 przedstawia przegląd przestrzeni roboczych powstałych w wyniku kombinacji trzech par
Image295 Rys. 4.337. Schemat logiczny dwójkowego sumatora szeregowego służącego do realizacji operac
9 Rys. 5. Struktura edukacji zawodowej (model własny). Rys. 6. Model edukacji zawodowej w integracji
Elementy składowe kotłowni parowej Rys. 28: Pomost roboczy kotła montowany na wszystkich kotłach par
więcej podobnych podstron