1947995061
16
a)
I-:-;-;-! przestrzeń pracy manipulatora
b)
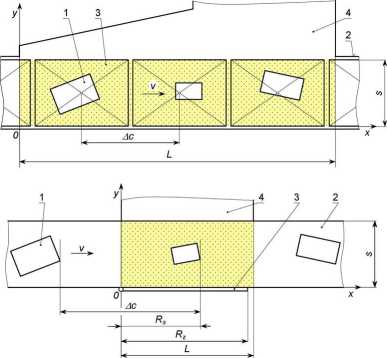
Rys. 2.8. Schemat przestrzeni roboczej manipulatora: a) potokowego wyposażonego w tacki (np.
uchylne), b) stacjonarnego (np. manipulator z aktywną zastawą obrotow ą): 1 - ładunek jednostkowy, 2 - przenośnik główny, 3 - element wykonawczy manipulatora, 4 - ześlizg (nowy kierunek dalszego transportowania), s - szerokość przenośnika, Ac - odległość pomiędzy czołami ładunków, v - prędkość unoszenia przenośnika, L - długość strefy roboczej manipulatora, w której realizowany jest transfer ładunku do ześlizgu, Rs - położenie czoła ładunku w chwili zadziałania członu roboczego manipulatora, Rz - długość członu roboczego
W przypadku sortowania ładunków manipulatorami stacjonarnymi (np. manipulatorami z zastawami aktywnymi o mchu obrotowym - rys. 2.8b) odległość Ac określana jest wyrażeniem wynikającym z utrzymania ciągłości strugi zasilającej manipulator oraz z warunku wymuszenia obecności w strefie pracy manipulatora tylko pojedynczego obiektu:
(2.2)
[vtz gdy vt2 > Ąllax + A
Mmax + A gdy inaczej
gdzie:
t=t,+L
maksymalna długość ładunku, odległość pomiędzy ładunkami,
czas zgarnięcia ładunku,
czas cyklu pracy manipulatora,
Wyszukiwarka
Podobne podstrony:
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Rys. 5. Sch
16 B. Czajka, M. Pietrowski, L. Wachowski Rys. 2. Schemat ideowy metody programowanej-redukcji (TPR)
16 Rozdział 1. Bilans materiałowy Rys. 1.6. Schemat bilansowy kondensatora do oddzielania amoniaku (
CCI20130725�093 95 6.5. Tryby pracy bioreaktorów Rys. 6.3. Schemat hodowli ciągtej z catkowitym wymi
Rys. 5.89. Obróbka elektrochemiczna bezstykowa: a) przestrzeń robocza, b) schemat obróbki łopatki
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
gdy przestrzeń robocza pełnej sprawności składa się z tych punktów, które manipulator może osiągnąć
093 5 Rys. 3.11. Przebieg zmian temperatury gazu w przestrzeni roboczej silnika; i = 13, T = 800 K.
Przestrajamy odbiorniki Amator i Amator 2 Stereo 2 DETEKTOR AM Rys.2. Schemat ideowy i blokowy ora
więcej podobnych podstron