6790846705
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r.
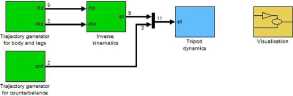
Rys. 5. Schemat modelu symulacyjnego robota
Dokonano dekompozycji modelu dynamiki robota na kolejne podsystemy (Rys. 6), którymi są:
• korpus (Mobile platform),
• pedipulatory (Leg 1 - 3),
• układ stabilizacji ruchu w postaci ruchomej masy przeciwwagi (Counterbalance),
• otoczenie (World), w którym zdefiniowano wektor grawitacji, początkowe położenie i orientację korpusu robota względem układu nieruchomego oraz geometrię i typ podłoża.
Model dynamiki robota został opracowany w taki sposób, że wielkościami zadanymi są kąty w parach kinematycznych pedipulatorów i układu stabilizacji ruchu, a wyznaczane są momenty napędowe. Korpus robota jest połączony z podłożem za pomocą pary kinematycznej o sześciu stopniach swobody (Bushing Joint), która pozawala na zdefiniowanie aktualnej pozycji i orientacji korpusu robota. Podsystem korpusu zawiera definicję tego członu, tj. geometrii i parametrów masowych. Za pomoczą bloku Body Sensor umożliwia wyświetlenie wybranych parametrów kątowych ruchu korpusu i parametrów liniowych ruchu jego charakterystycznych punktów.
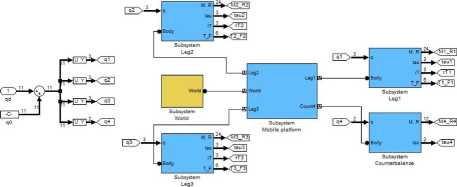
Rys. 6. Dekompozycja modelu dynamiki robota na podsystemy
<_[>*-

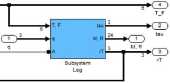
Rys. 7. Podsystem pedipulatora
5
Wyszukiwarka
Podobne podstrony:
Artykuł Autorski, XI Forum Inżynierskiego ProCAx cz. II, Kraków, 16-18 października 2012 r. Aktualne
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Dr inż. Mac
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Do znanych
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Najważniejs
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Podsystem
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. W pracy ana
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Otrzymane w
Artykuł Autorski, XI Forum Inżynierskie ProCAx cz. II, Kraków 16-18 Października 2012 r. Animacja ru
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. Dr inż.
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. procedu
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. Zgodnie
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. Generow
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. chwytak
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. -
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. L 2 L
Artykuł Autorski, XII Forum Inżynierskiego ProCAx cz. II, Kraków, 15-17 października 2013 r. W model
Artykuł Autorski, XI Forum Inżynierskiego ProCAxcz. II, Kraków, 16-18 października 2012 r. Rys. 11 L
więcej podobnych podstron